 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFastRLAP: A System for Learning High-Speed Driving via Deep RL and Autonomous Practicing
Paper and Code
Apr 19, 2023
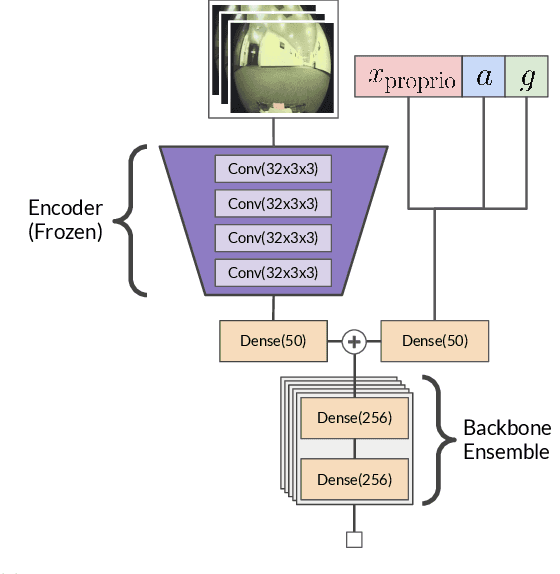
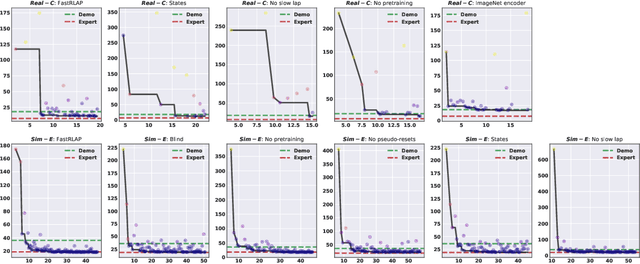

We present a system that enables an autonomous small-scale RC car to drive aggressively from visual observations using reinforcement learning (RL). Our system, FastRLAP (faster lap), trains autonomously in the real world, without human interventions, and without requiring any simulation or expert demonstrations. Our system integrates a number of important components to make this possible: we initialize the representations for the RL policy and value function from a large prior dataset of other robots navigating in other environments (at low speed), which provides a navigation-relevant representation. From here, a sample-efficient online RL method uses a single low-speed user-provided demonstration to determine the desired driving course, extracts a set of navigational checkpoints, and autonomously practices driving through these checkpoints, resetting automatically on collision or failure. Perhaps surprisingly, we find that with appropriate initialization and choice of algorithm, our system can learn to drive over a variety of racing courses with less than 20 minutes of online training. The resulting policies exhibit emergent aggressive driving skills, such as timing braking and acceleration around turns and avoiding areas which impede the robot's motion, approaching the performance of a human driver using a similar first-person interface over the course of training.