 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast, Robust, and Versatile Event Detection through HMM Belief State Gradient Measures
Paper and Code
Jun 20, 2018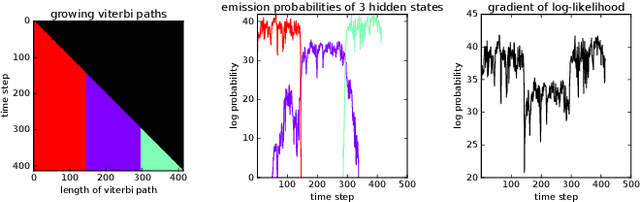
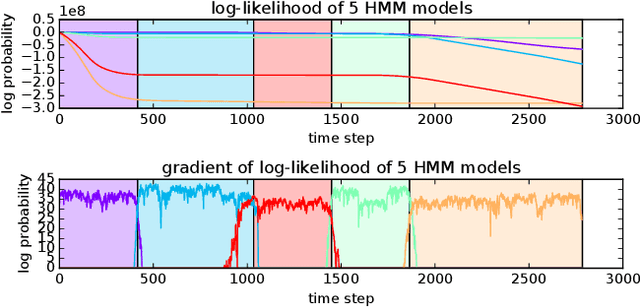
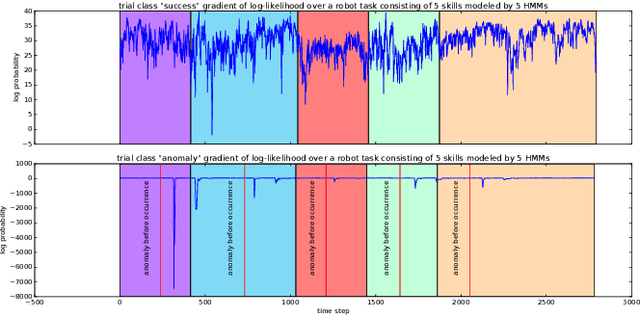

Event detection is a critical feature in data-driven systems as it assists with the identification of nominal and anomalous behavior. Event detection is increasingly relevant in robotics as robots operate with greater autonomy in increasingly unstructured environments. In this work, we present an accurate, robust, fast, and versatile measure for skill and anomaly identification. A theoretical proof establishes the link between the derivative of the log-likelihood of the HMM filtered belief state and the latest emission probabilities. The key insight is the inverse relationship in which gradient analysis is used for skill and anomaly identification. Our measure showed better performance across all metrics than related state-of-the art works. The result is broadly applicable to domains that use HMMs for event detection.