 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFabric Defect Detection Using Vision-Based Tactile Sensor
Paper and Code
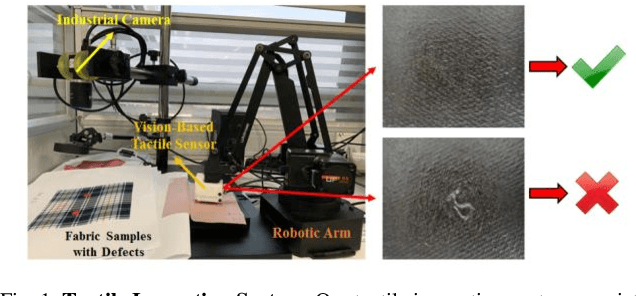
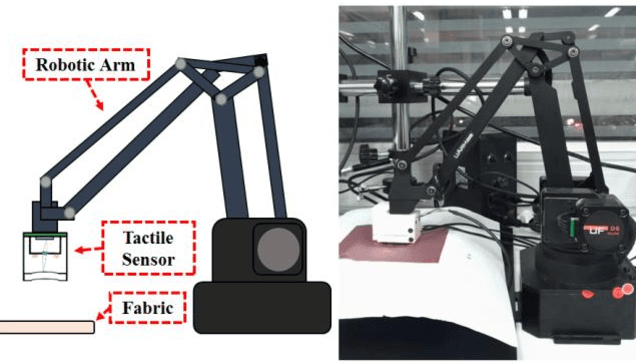
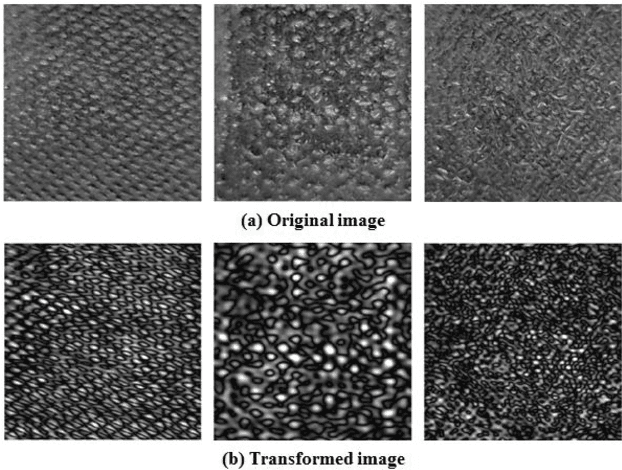
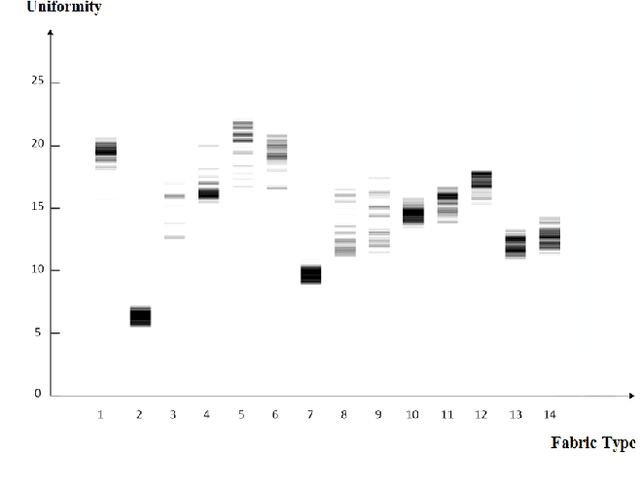
This paper introduces a new type of system for fabric defect detection with the tactile inspection system. Different from existed visual inspection systems, the proposed system implements a vision-based tactile sensor. The tactile sensor, which mainly consists of a camera, four LEDs, and an elastic sensing layer, captures detailed information about fabric surface structure and ignores the color and pattern. Thus, the ambiguity between a defect and image background related to fabric color and pattern is avoided. To utilize the tactile sensor for fabric inspection, we employ intensity adjustment for image preprocessing, Residual Network with ensemble learning for detecting defects, and uniformity measurement for selecting ideal dataset for model training. An experiment is conducted to verify the performance of the proposed tactile system. The experimental results have demonstrated the feasibility of the proposed system, which performs well in detecting structural defects for various types of fabrics. In addition, the system does not require external light sources, which skips the process of setting up and tuning a lighting environment.