 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEstimating 3D Motion and Forces of Human-Object Interactions from Internet Videos
Paper and Code
Nov 02, 2021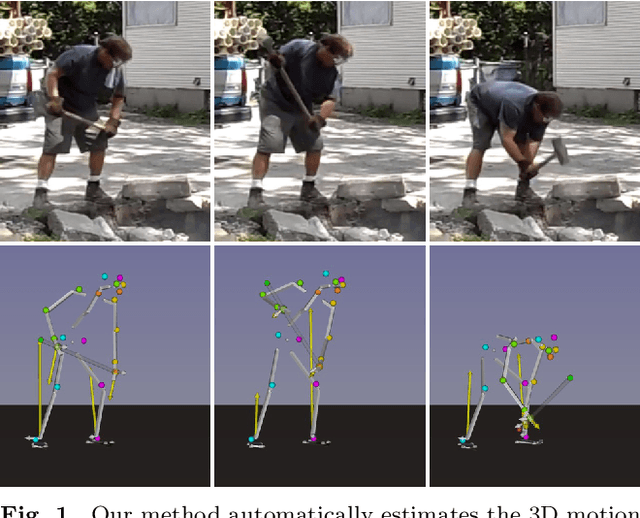
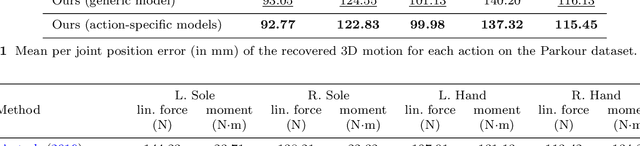
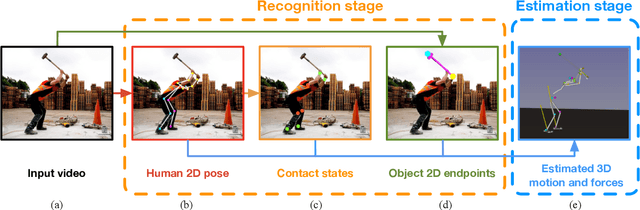

In this paper, we introduce a method to automatically reconstruct the 3D motion of a person interacting with an object from a single RGB video. Our method estimates the 3D poses of the person together with the object pose, the contact positions and the contact forces exerted on the human body. The main contributions of this work are three-fold. First, we introduce an approach to jointly estimate the motion and the actuation forces of the person on the manipulated object by modeling contacts and the dynamics of the interactions. This is cast as a large-scale trajectory optimization problem. Second, we develop a method to automatically recognize from the input video the 2D position and timing of contacts between the person and the object or the ground, thereby significantly simplifying the complexity of the optimization. Third, we validate our approach on a recent video+MoCap dataset capturing typical parkour actions, and demonstrate its performance on a new dataset of Internet videos showing people manipulating a variety of tools in unconstrained environments.