 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation
Paper and Code
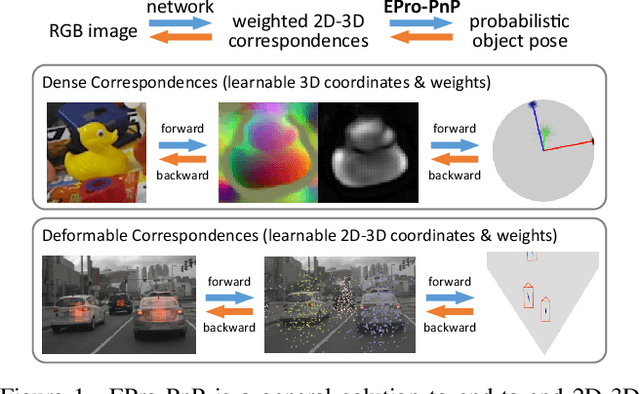
Locating 3D objects from a single RGB image via Perspective-n-Point (PnP) is a long-standing problem in computer vision. Driven by end-to-end deep learning, recent studies suggest interpreting PnP as a differentiable layer, allowing for partial learning of 2D-3D point correspondences by backpropagating the gradients of pose loss. Yet, learning the entire correspondences from scratch is highly challenging, particularly for ambiguous pose solutions, where the globally optimal pose is theoretically non-differentiable w.r.t. the points. In this paper, we propose the EPro-PnP, a probabilistic PnP layer for general end-to-end pose estimation, which outputs a distribution of pose with differentiable probability density on the SE(3) manifold. The 2D-3D coordinates and corresponding weights are treated as intermediate variables learned by minimizing the KL divergence between the predicted and target pose distribution. The underlying principle generalizes previous approaches, and resembles the attention mechanism. EPro-PnP can enhance existing correspondence networks, closing the gap between PnP-based method and the task-specific leaders on the LineMOD 6DoF pose estimation benchmark. Furthermore, EPro-PnP helps to explore new possibilities of network design, as we demonstrate a novel deformable correspondence network with the state-of-the-art pose accuracy on the nuScenes 3D object detection benchmark. Our code is available at https://github.com/tjiiv-cprg/EPro-PnP-v2.