 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-end Recurrent Multi-Object Tracking and Trajectory Prediction with Relational Reasoning
Paper and Code
Aug 09, 2019
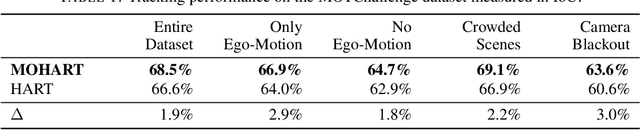

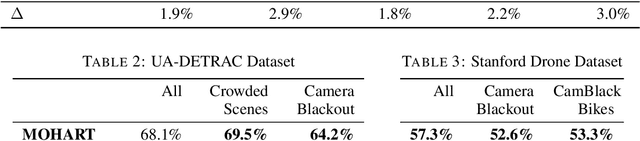
The majority of contemporary object-tracking approaches used in autonomous vehicles do not model interactions between objects. This contrasts with the fact that objects' paths are not independent: a cyclist might abruptly deviate from a previously planned trajectory in order to avoid colliding with a car. Building upon HART, a neural, class-agnostic single-object tracker, we introduce a multi-object tracking method MOHART capable of relational reasoning. Importantly, the entire system, including the understanding of interactions and relations between objects, is class-agnostic and learned simultaneously in an end-to-end fashion. We find that the addition of relational-reasoning capabilities to HART leads to consistent performance gains in tracking as well as future trajectory prediction on several real-world datasets (MOTChallenge, UA-DETRAC, and Stanford Drone dataset), particularly in the presence of ego-motion, occlusions, crowded scenes, and faulty sensor inputs. Finally, based on controlled simulations, we propose that a comparison of MOHART and HART may be used as a novel way to measure the degree to which the objects in a video depend upon each other as they move together through time.