 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Navigation in Unknown Environments using Neural Networks
Paper and Code
Jul 24, 2017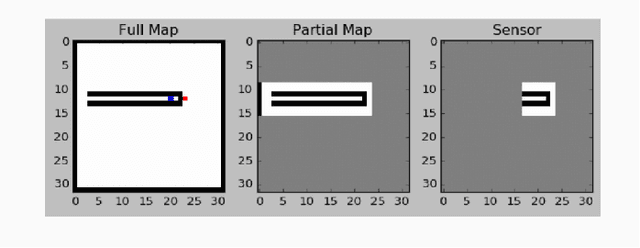
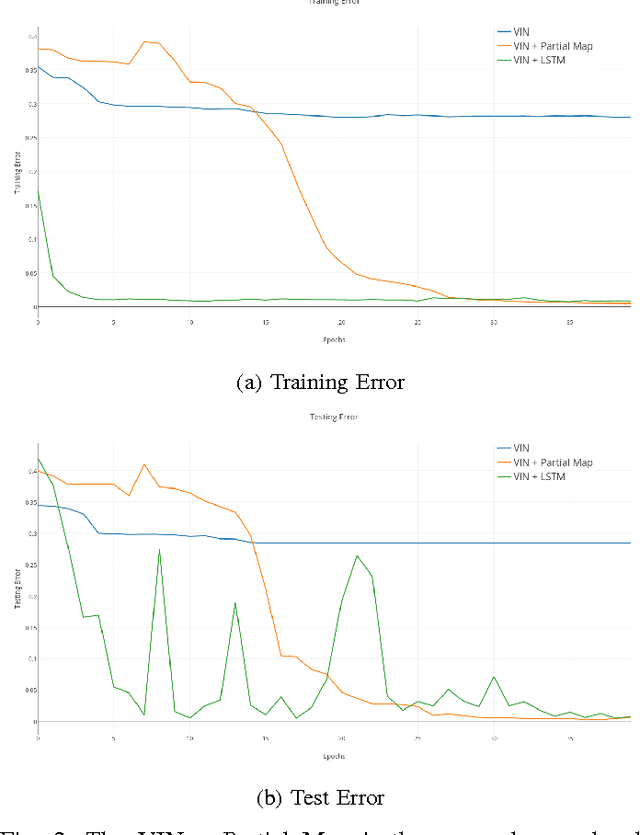
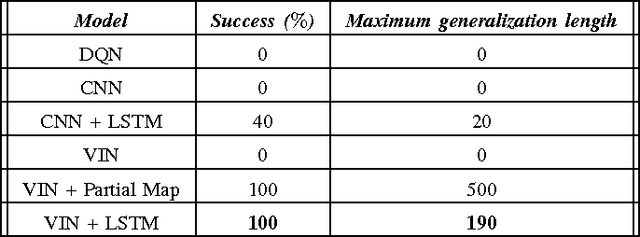
We investigate how a neural network can learn perception actions loops for navigation in unknown environments. Specifically, we consider how to learn to navigate in environments populated with cul-de-sacs that represent convex local minima that the robot could fall into instead of finding a set of feasible actions that take it to the goal. Traditional methods rely on maintaining a global map to solve the problem of over coming a long cul-de-sac. However, due to errors induced from local and global drift, it is highly challenging to maintain such a map for long periods of time. One way to mitigate this problem is by using learning techniques that do not rely on hand engineered map representations and instead output appropriate control policies directly from their sensory input. We first demonstrate that such a problem cannot be solved directly by deep reinforcement learning due to the sparse reward structure of the environment. Further, we demonstrate that deep supervised learning also cannot be used directly to solve this problem. We then investigate network models that offer a combination of reinforcement learning and supervised learning and highlight the significance of adding fully differentiable memory units to such networks. We evaluate our networks on their ability to generalize to new environments and show that adding memory to such networks offers huge jumps in performance