 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEffMoP: Efficient Motion Planning Based on Heuristic-Guided Motion Primitives Pruning and Path Optimization With Sparse-Banded Structure
Paper and Code
Dec 16, 2020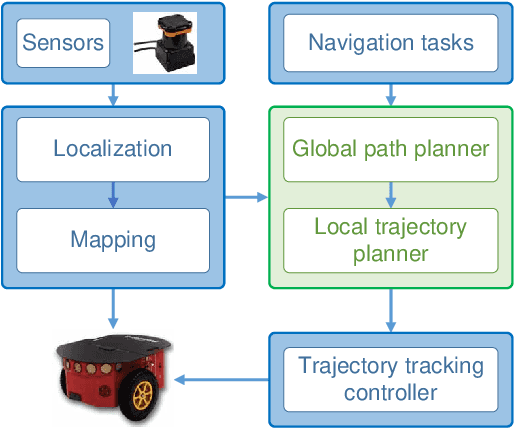
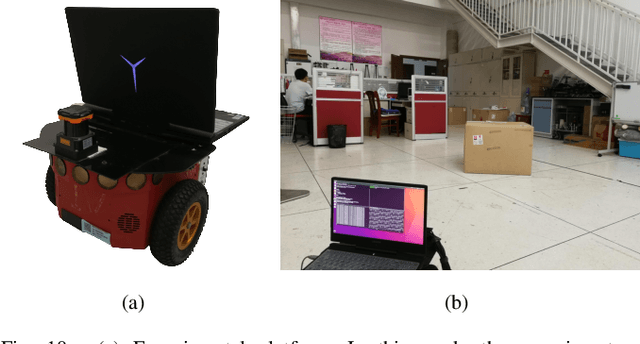


To solve the autonomous navigation problem in complex environments, an efficient motion planning approach called EffMoP is presented in this paper. Considering the challenges from large-scale, partially unknown complex environments, a three-layer motion planning framework is elaborately designed, including global path planning, local path optimization, and time-optimal velocity planning. Compared with existing approaches, the novelty of this work is twofold: 1) a heuristic-guided pruning strategy of motion primitives is newly designed and fully integrated into the search-based global path planner to improve the computational efficiency of graph search, and 2) a novel soft-constrained local path optimization approach is proposed, wherein the sparse-banded system structure of the underlying optimization problem is fully exploited to efficiently solve the problem. We validate the safety, smoothness, flexibility, and efficiency of EffMoP in various complex simulation scenarios and challenging real-world tasks. It is shown that the computational efficiency is improved by 66.21% in the global planning stage and the motion efficiency of the robot is improved by 22.87% compared with the recent quintic B\'{e}zier curve-based state space sampling approach.