 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Camera Exposure Control for Visual Odometry via Deep Reinforcement Learning
Paper and Code
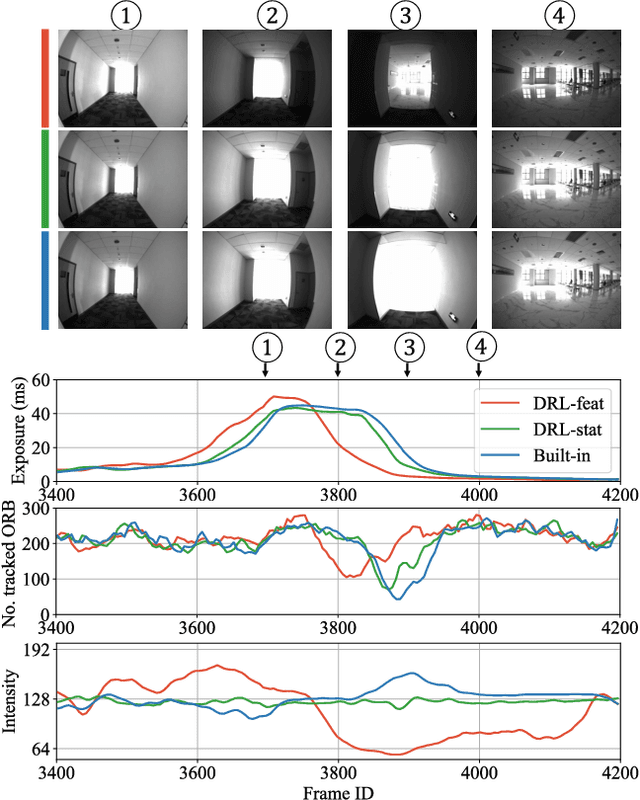
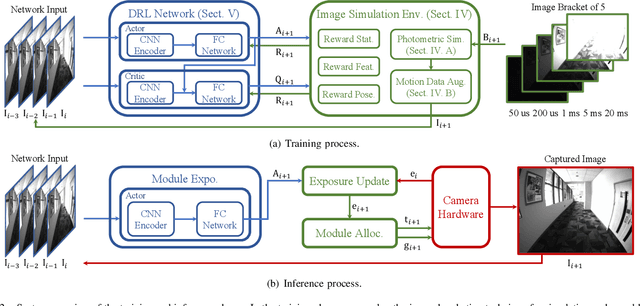
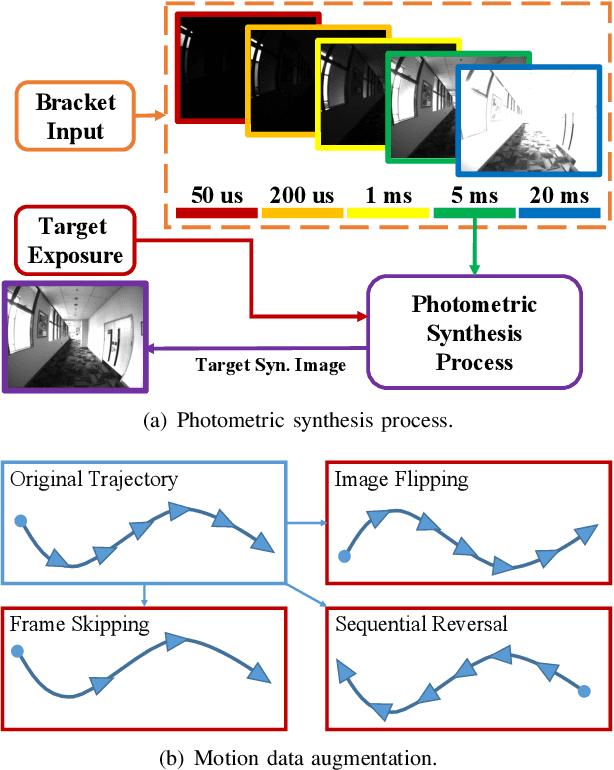

The stability of visual odometry (VO) systems is undermined by degraded image quality, especially in environments with significant illumination changes. This study employs a deep reinforcement learning (DRL) framework to train agents for exposure control, aiming to enhance imaging performance in challenging conditions. A lightweight image simulator is developed to facilitate the training process, enabling the diversification of image exposure and sequence trajectory. This setup enables completely offline training, eliminating the need for direct interaction with camera hardware and the real environments. Different levels of reward functions are crafted to enhance the VO systems, equipping the DRL agents with varying intelligence. Extensive experiments have shown that our exposure control agents achieve superior efficiency-with an average inference duration of 1.58 ms per frame on a CPU-and respond more quickly than traditional feedback control schemes. By choosing an appropriate reward function, agents acquire an intelligent understanding of motion trends and anticipate future illumination changes. This predictive capability allows VO systems to deliver more stable and precise odometry results. The codes and datasets are available at https://github.com/ShuyangUni/drl_exposure_ctrl.