Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficiency Improvement of Measurement Pose Selection Techniques in Robot Calibration
Paper and Code
Nov 26, 2013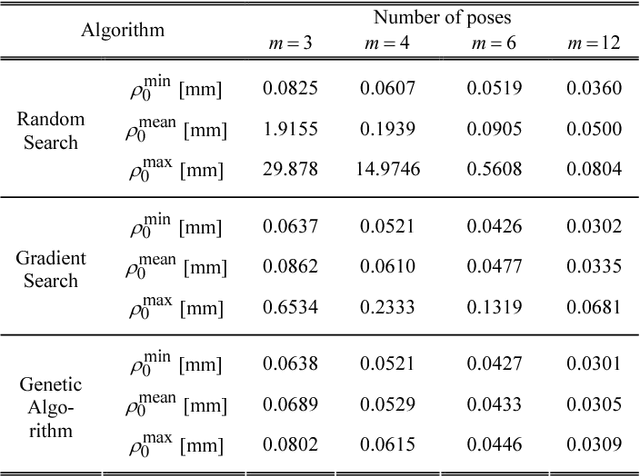
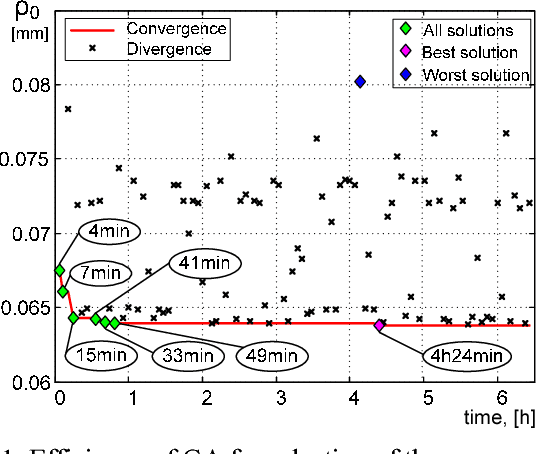
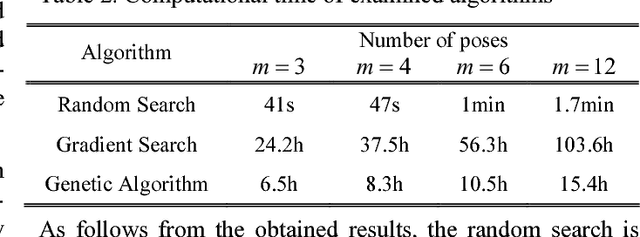
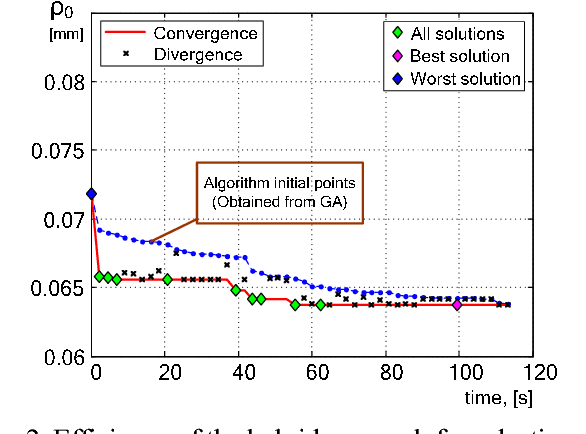
The paper deals with the design of experiments for manipulator geometric and elastostatic calibration based on the test-pose approach. The main attention is paid to the efficiency improvement of numerical techniques employed in the selection of optimal measurement poses for calibration experiments. The advantages of the developed technique are illustrated by simulation examples that deal with the geometric calibration of the industrial robot of serial architecture.
* The IFAC Conference on Manufacturing Modeling, Management and
Control (MIM 2013), Saint Petersburg : Russie, F\'ed\'eration De (2013)
View paper on