 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic System Identification, and Control for a cost effective open-source VTOL MAV
Paper and Code
Mar 09, 2017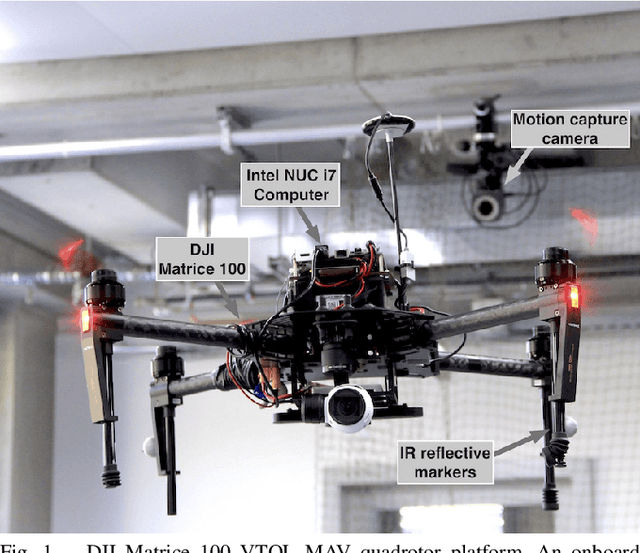
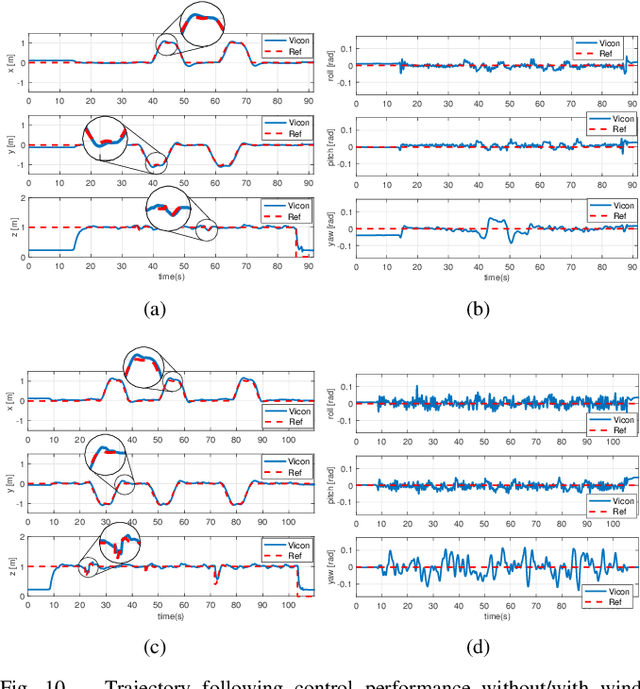
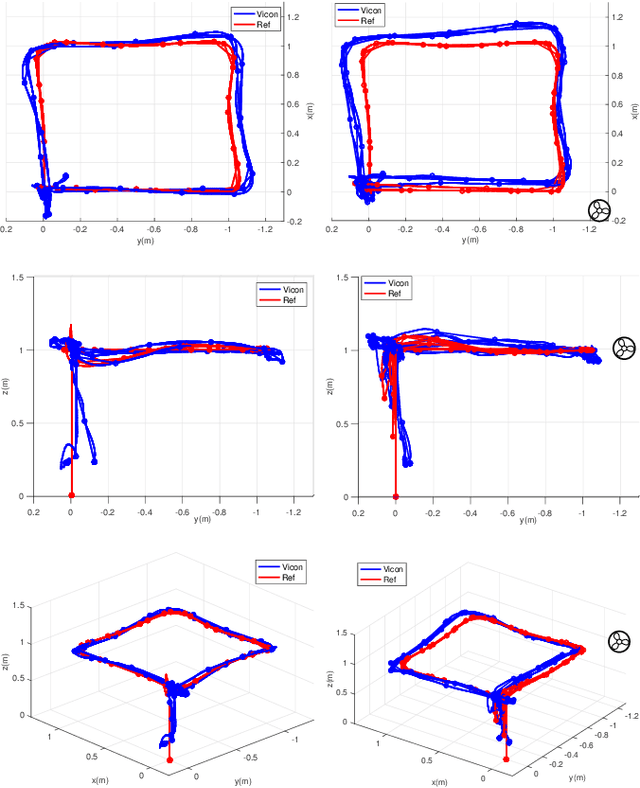
This paper describes dynamic system identification, and full control of a cost-effective vertical take-off and landing (VTOL) multi-rotor micro-aerial vehicle (MAV) --- DJI Matrice 100. The dynamics of the vehicle and autopilot controllers are identified using only a built-in IMU and utilized to design a subsequent model predictive controller (MPC). Experimental results for the control performance are evaluated using a motion capture system while performing hover, step responses, and trajectory following tasks in the present of external wind disturbances. We achieve root-mean-square (RMS) errors between the reference and actual trajectory of x=0.021m, y=0.016m, z=0.029m, roll=0.392deg, pitch=0.618deg, and yaw=1.087deg while performing hover. This paper also conveys the insights we have gained about the platform and returned to the community through open-source code, and documentation.