 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDSNAS: Direct Neural Architecture Search without Parameter Retraining
Paper and Code
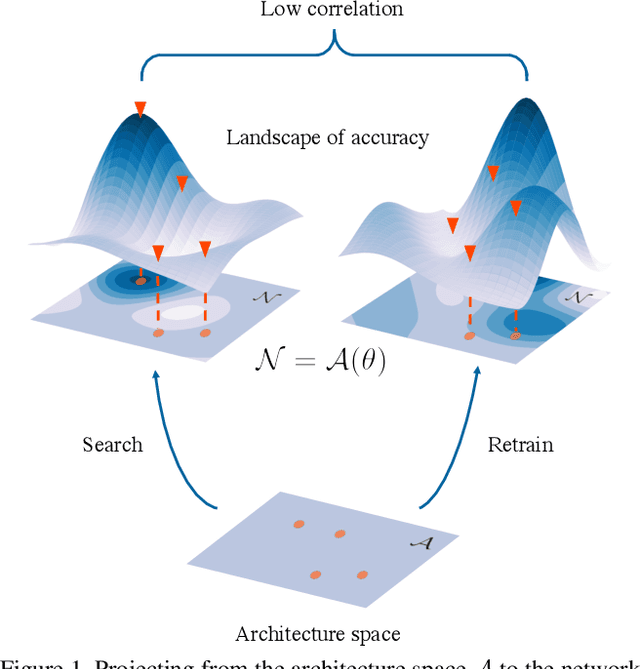
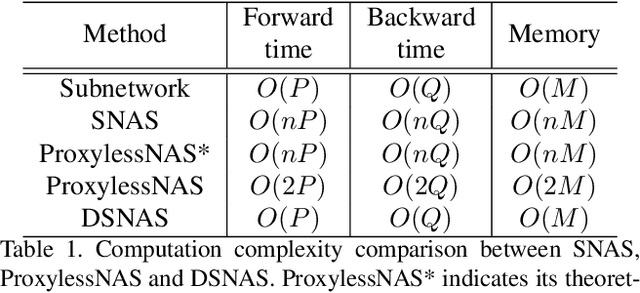
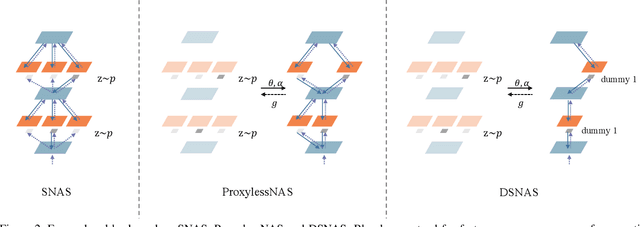
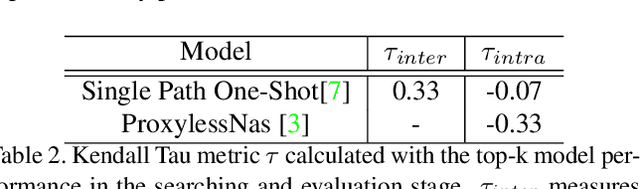
If NAS methods are solutions, what is the problem? Most existing NAS methods require two-stage parameter optimization. However, performance of the same architecture in the two stages correlates poorly. In this work, we propose a new problem definition for NAS, task-specific end-to-end, based on this observation. We argue that given a computer vision task for which a NAS method is expected, this definition can reduce the vaguely-defined NAS evaluation to i) accuracy of this task and ii) the total computation consumed to finally obtain a model with satisfying accuracy. Seeing that most existing methods do not solve this problem directly, we propose DSNAS, an efficient differentiable NAS framework that simultaneously optimizes architecture and parameters with a low-biased Monte Carlo estimate. Child networks derived from DSNAS can be deployed directly without parameter retraining. Comparing with two-stage methods, DSNAS successfully discovers networks with comparable accuracy (74.4%) on ImageNet in 420 GPU hours, reducing the total time by more than 34%.