 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDROID: Minimizing the Reality Gap using Single-Shot Human Demonstration
Paper and Code
Feb 23, 2021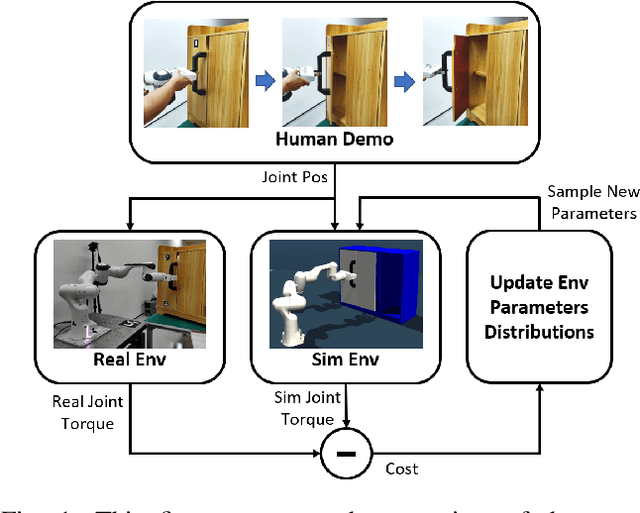



Reinforcement learning (RL) has demonstrated great success in the past several years. However, most of the scenarios focus on simulated environments. One of the main challenges of transferring the policy learned in a simulated environment to real world, is the discrepancy between the dynamics of the two environments. In prior works, Domain Randomization (DR) has been used to address the reality gap for both robotic locomotion and manipulation tasks. In this paper, we propose Domain Randomization Optimization IDentification (DROID), a novel framework to exploit single-shot human demonstration for identifying the simulator's distribution of dynamics parameters, and apply it to training a policy on a door opening task. Our results show that the proposed framework can identify the difference in dynamics between the simulated and the real worlds, and thus improve policy transfer by optimizing the simulator's randomization ranges. We further illustrate that based on these same identified parameters, our method can generalize the learned policy to different but related tasks.