 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriving-Policy Adaptive Safeguard for Autonomous Vehicles Using Reinforcement Learning
Paper and Code
Dec 02, 2020
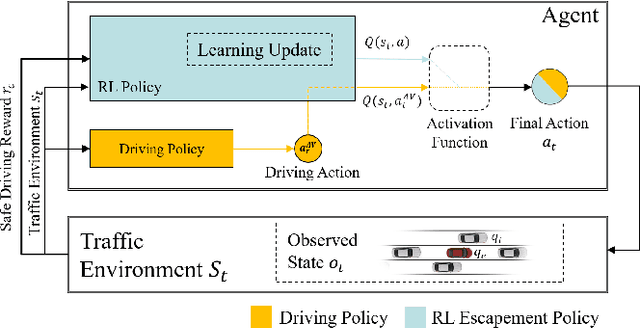
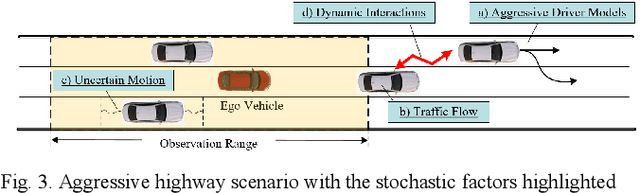

Safeguard functions such as those provided by advanced emergency braking (AEB) can provide another layer of safety for autonomous vehicles (AV). A smart safeguard function should adapt the activation conditions to the driving policy, to avoid unnecessary interventions as well as improve vehicle safety. This paper proposes a driving-policy adaptive safeguard (DPAS) design, including a collision avoidance strategy and an activation function. The collision avoidance strategy is designed in a reinforcement learning framework, obtained by Monte-Carlo Tree Search (MCTS). It can learn from past collisions and manipulate both braking and steering in stochastic traffics. The driving-policy adaptive activation function should dynamically assess current driving policy risk and kick in when an urgent threat is detected. To generate this activation function, MCTS' exploration and rollout modules are designed to fully evaluate the AV's current driving policy, and then explore other safer actions. In this study, the DPAS is validated with two typical highway-driving policies. The results are obtained through and 90,000 times in the stochastic and aggressive simulated traffic. The results are calibrated by naturalistic driving data and show that the proposed safeguard reduces the collision rate significantly without introducing more interventions, compared with the state-based benchmark safeguards. In summary, the proposed safeguard leverages the learning-based method in stochastic and emergent scenarios and imposes minimal influence on the driving policy.