 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRF: A Framework for High-Accuracy Autonomous Driving Vehicle Modeling
Paper and Code
Nov 01, 2020
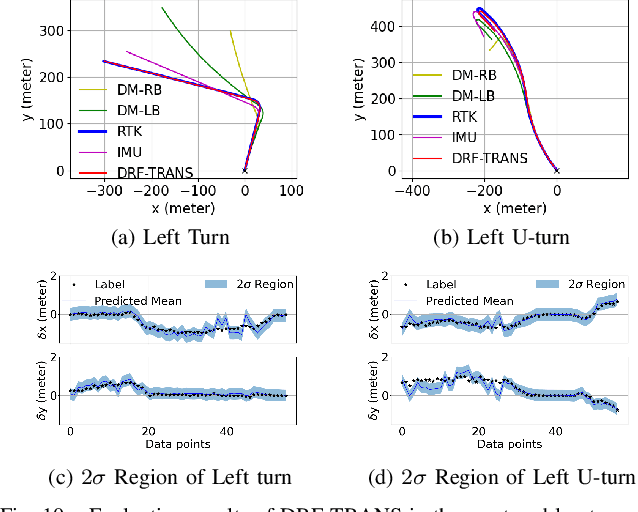
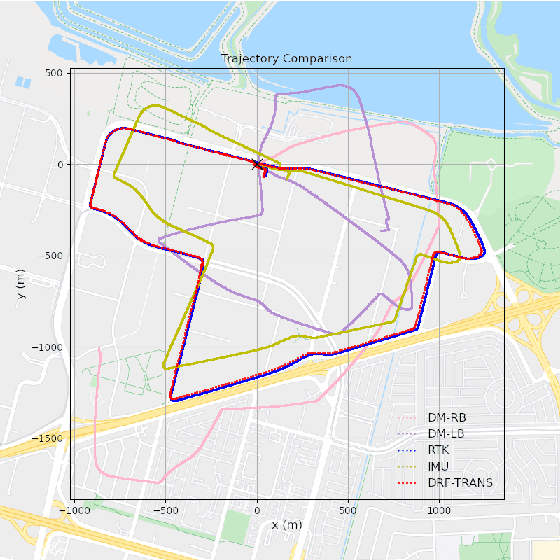

An accurate vehicle dynamic model is the key to bridge the gap between simulation and real road test in autonomous driving. In this paper, we present a Dynamic model-Residual correction model Framework (DRF) for vehicle dynamic modeling. On top of any existing open-loop dynamic model, this framework builds a Residual Correction Model (RCM) by integrating deep Neural Networks (NN) with Sparse Variational Gaussian Process (SVGP) model. RCM takes a sequence of vehicle control commands and dynamic status for a certain time duration as modeling inputs, extracts underlying context from this sequence with deep encoder networks, and predicts open-loop dynamic model prediction errors. Five vehicle dynamic models are derived from DRF via encoder variation. Our contribution is consolidated by experiments on evaluation of absolute trajectory error and similarity between DRF outputs and the ground truth. Compared to classic rule-based and learning-based vehicle dynamic models, DRF accomplishes as high as 74.12% to 85.02% of absolute trajectory error drop among all DRF variations.