 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDownhole Track Detection via Multiscale Conditional Generative Adversarial Nets
Paper and Code
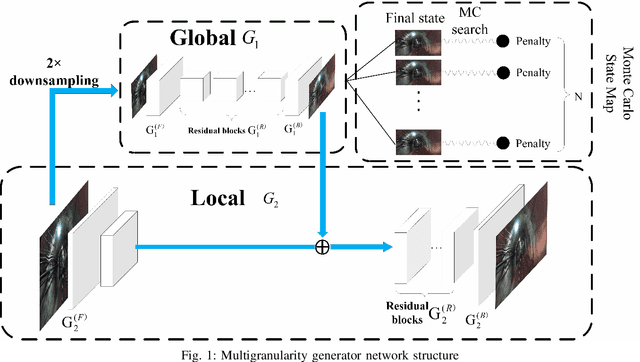
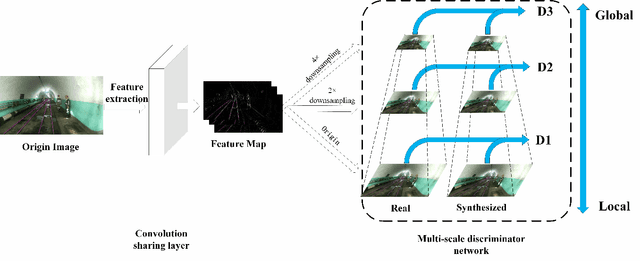
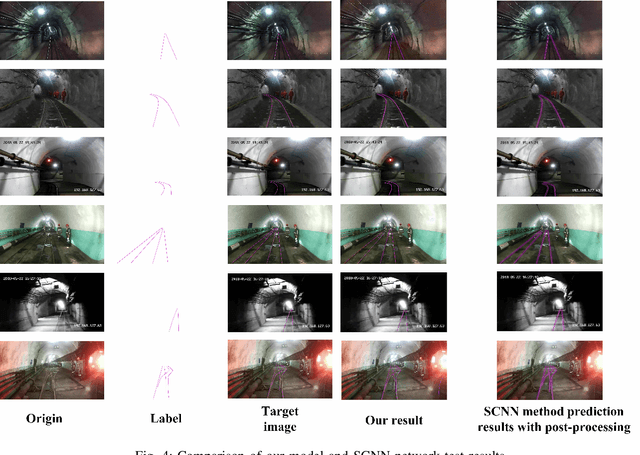
Frequent mine disasters cause a large number of casualties and property losses. Autonomous driving is a fundamental measure for solving this problem, and track detection is one of the key technologies for computer vision to achieve downhole automatic driving. The track detection result based on the traditional convolutional neural network (CNN) algorithm lacks the detailed and unique description of the object and relies too much on visual postprocessing technology. Therefore, this paper proposes a track detection algorithm based on a multiscale conditional generative adversarial network (CGAN). The generator is decomposed into global and local parts using a multigranularity structure in the generator network. A multiscale shared convolution structure is adopted in the discriminator network to further supervise training the generator. Finally, the Monte Carlo search technique is introduced to search the intermediate state of the generator, and the result is sent to the discriminator for comparison. Compared with the existing work, our model achieved 82.43\% pixel accuracy and an average intersection-over-union (IOU) of 0.6218, and the detection of the track reached 95.01\% accuracy in the downhole roadway scene test set.