Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDisturbance Rejection Control for Autonomous Trolley Collection Robots with Prescribed Performance
Paper and Code
Sep 22, 2023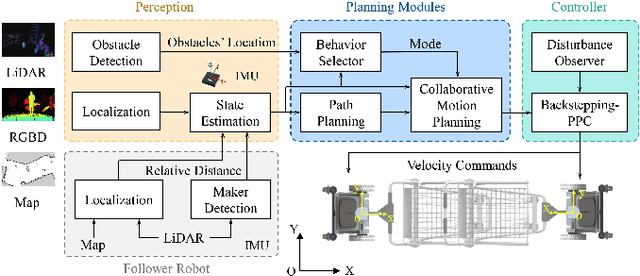

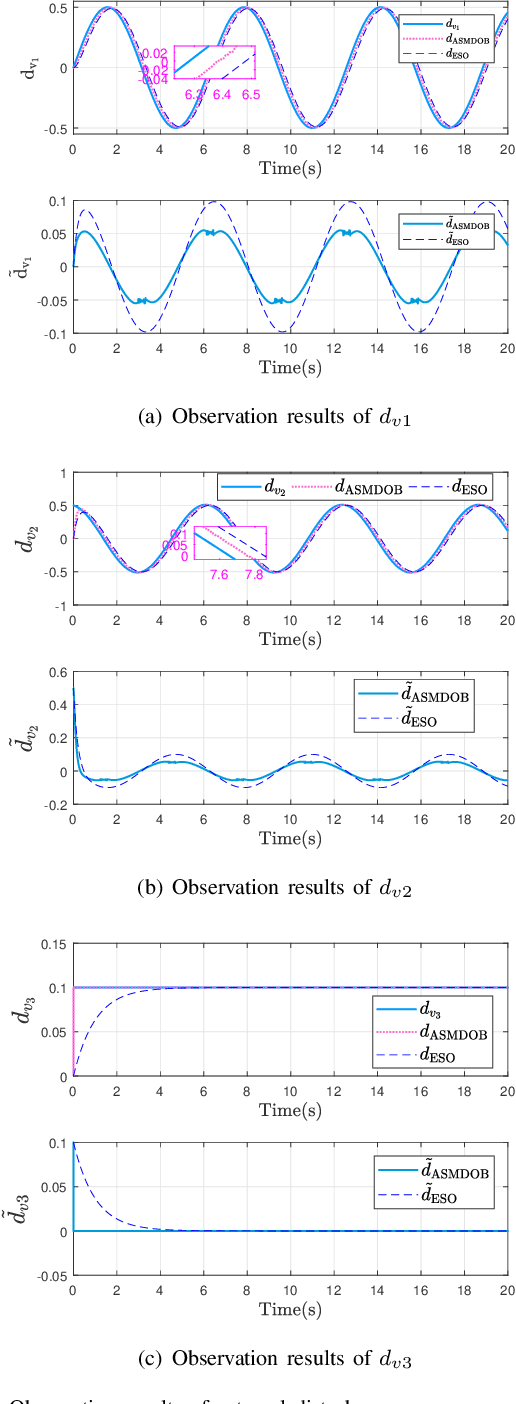
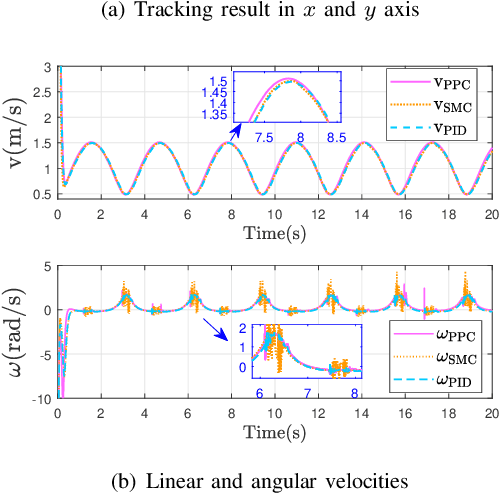
Trajectory tracking control of autonomous trolley collection robots (ATCR) is an ambitious work due to the complex environment, serious noise and external disturbances. This work investigates a control scheme for ATCR subjecting to severe environmental interference. A kinematics model based adaptive sliding mode disturbance observer with fast convergence is first proposed to estimate the lumped disturbances. On this basis, a robust controller with prescribed performance is proposed using a backstepping technique, which improves the transient performance and guarantees fast convergence. Simulation outcomes have been provided to illustrate the effectiveness of the proposed control scheme.
View paper on