Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirect Sparse Odometry with Rolling Shutter
Paper and Code
Aug 01, 2018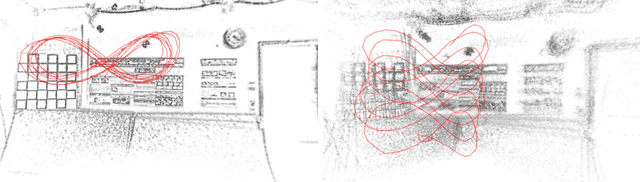
Neglecting the effects of rolling-shutter cameras for visual odometry (VO) severely degrades accuracy and robustness. In this paper, we propose a novel direct monocular VO method that incorporates a rolling-shutter model. Our approach extends direct sparse odometry which performs direct bundle adjustment of a set of recent keyframe poses and the depths of a sparse set of image points. We estimate the velocity at each keyframe and impose a constant-velocity prior for the optimization. In this way, we obtain a near real-time, accurate direct VO method. Our approach achieves improved results on challenging rolling-shutter sequences over state-of-the-art global-shutter VO.
View paper on