 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiPA: Diverse and Probabilistically Accurate Interactive Prediction
Paper and Code
Oct 12, 2022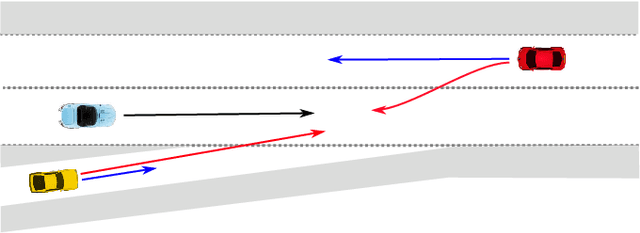
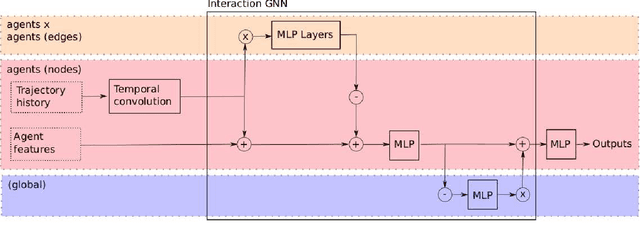

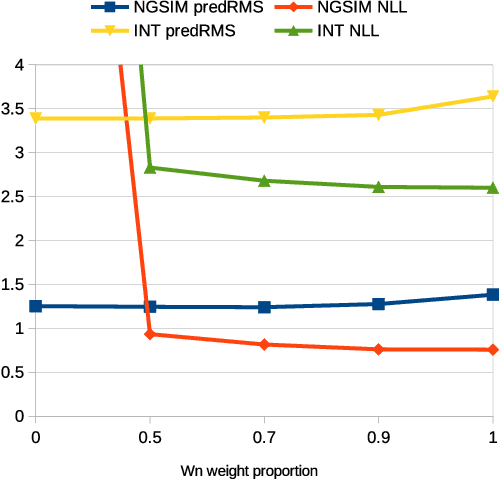
Accurate prediction is important for operating an autonomous vehicle in interactive scenarios. Previous interactive predictors have used closest-mode evaluations, which test if one of a set of predictions covers the ground-truth, but not if additional unlikely predictions are made. The presence of unlikely predictions can interfere with planning, by indicating conflict with the ego plan when it is not likely to occur. Closest-mode evaluations are not sufficient for showing a predictor is useful, an effective predictor also needs to accurately estimate mode probabilities, and to be evaluated using probabilistic measures. These two evaluation approaches, eg. predicted-mode RMS and minADE/FDE, are analogous to precision and recall in binary classification, and there is a challenging trade-off between prediction strategies for each. We present DiPA, a method for producing diverse predictions while also capturing accurate probabilistic estimates. DiPA uses a flexible representation that captures interactions in widely varying road topologies, and uses a novel training regime for a Gaussian Mixture Model that supports diversity of predicted modes, along with accurate spatial distribution and mode probability estimates. DiPA achieves state-of-the-art performance on INTERACTION and NGSIM, and improves over a baseline (MFP) when both closest-mode and probabilistic evaluations are used at the same time.