 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDetecting As Labeling: Rethinking LiDAR-camera Fusion in 3D Object Detection
Paper and Code
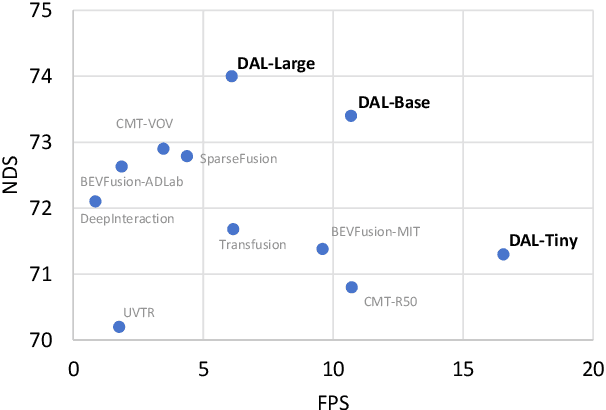
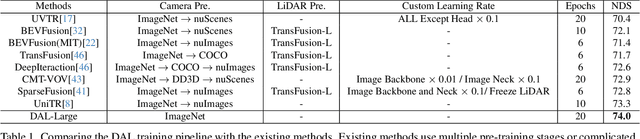
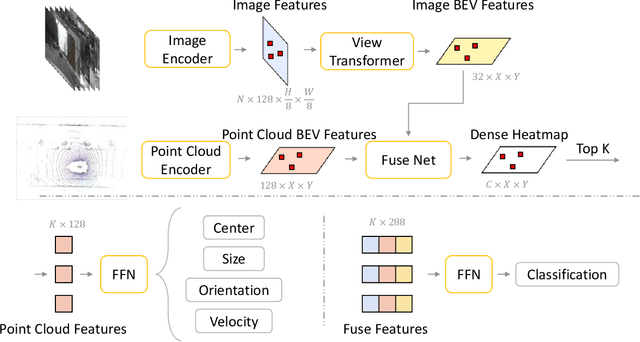
3D object Detection with LiDAR-camera encounters overfitting in algorithm development which is derived from the violation of some fundamental rules. We refer to the data annotation in dataset construction for theory complementing and argue that the regression task prediction should not involve the feature from the camera branch. By following the cutting-edge perspective of 'Detecting As Labeling', we propose a novel paradigm dubbed DAL. With the most classical elementary algorithms, a simple predicting pipeline is constructed by imitating the data annotation process. Then we train it in the simplest way to minimize its dependency and strengthen its portability. Though simple in construction and training, the proposed DAL paradigm not only substantially pushes the performance boundary but also provides a superior trade-off between speed and accuracy among all existing methods. With comprehensive superiority, DAL is an ideal baseline for both future work development and practical deployment. The code has been released to facilitate future work on https://github.com/HuangJunJie2017/BEVDet.