 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDensity-Aware Convolutional Networks with Context Encoding for Airborne LiDAR Point Cloud Classification
Paper and Code
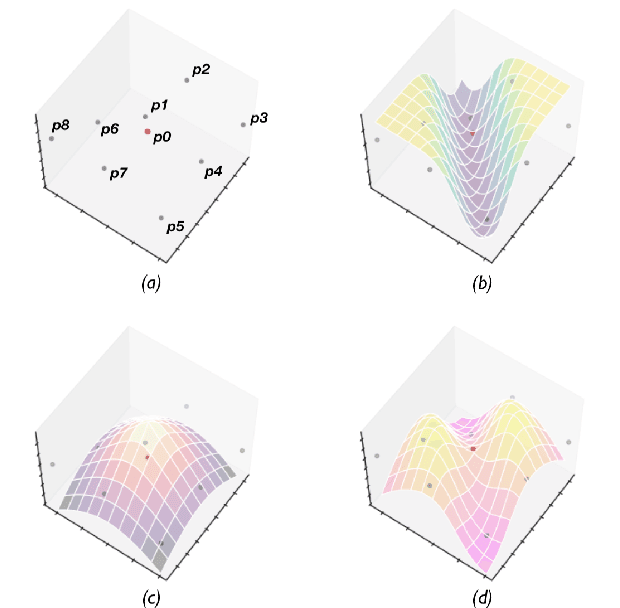

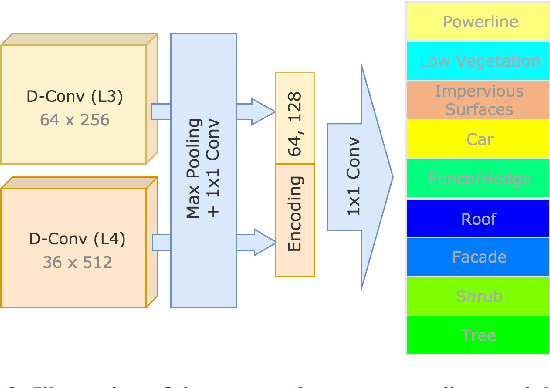
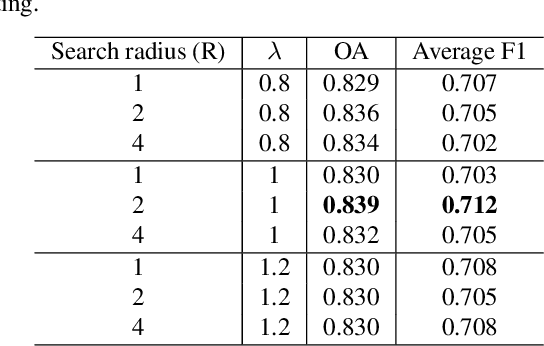
To better address challenging issues of the irregularity and inhomogeneity inherently present in 3D point clouds, researchers have been shifting their focus from the design of hand-craft point feature towards the learning of 3D point signatures using deep neural networks for 3D point cloud classification. Recent proposed deep learning based point cloud classification methods either apply 2D CNN on projected feature images or apply 1D convolutional layers directly on raw point sets. These methods cannot adequately recognize fine-grained local structures caused by the uneven density distribution of the point cloud data. In this paper, to address this challenging issue, we introduced a density-aware convolution module which uses the point-wise density to re-weight the learnable weights of convolution kernels. The proposed convolution module is able to fully approximate the 3D continuous convolution on unevenly distributed 3D point sets. Based on this convolution module, we further developed a multi-scale fully convolutional neural network with downsampling and upsampling blocks to enable hierarchical point feature learning. In addition, to regularize the global semantic context, we implemented a context encoding module to predict a global context encoding and formulated a context encoding regularizer to enforce the predicted context encoding to be aligned with the ground truth one. The overall network can be trained in an end-to-end fashion with the raw 3D coordinates as well as the height above ground as inputs. Experiments on the International Society for Photogrammetry and Remote Sensing (ISPRS) 3D labeling benchmark demonstrated the superiority of the proposed method for point cloud classification. Our model achieved a new state-of-the-art performance with an average F1 score of 71.2% and improved the performance by a large margin on several categories.