 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDense Hybrid Recurrent Multi-view Stereo Net with Dynamic Consistency Checking
Paper and Code
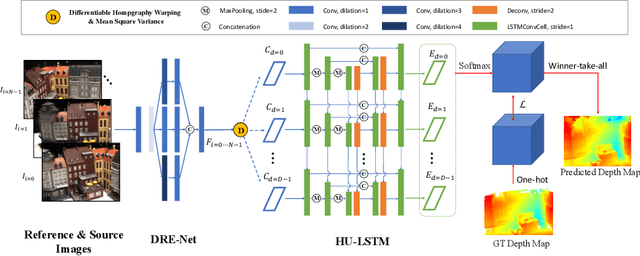
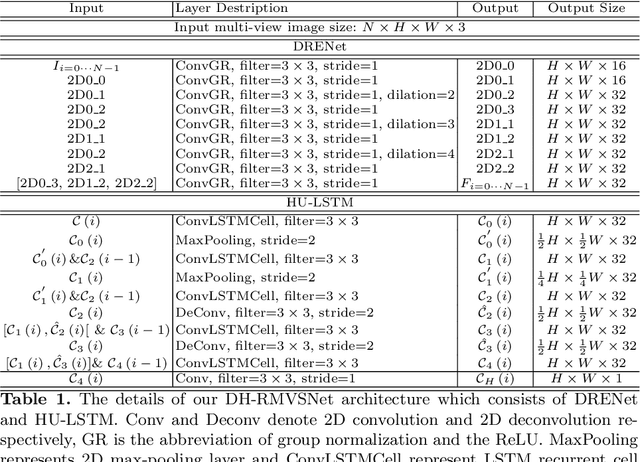
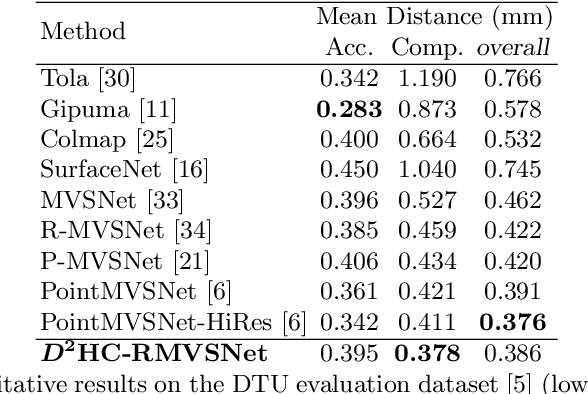

In this paper, we propose an efficient and effective dense hybrid recurrent multi-view stereo net with dynamic consistency checking, namely $D^{2}$HC-RMVSNet, for accurate dense point cloud reconstruction. Our novel hybrid recurrent multi-view stereo net consists of two core modules: 1) a light DRENet (Dense Reception Expanded) module to extract dense feature maps of original size with multi-scale context information, 2) a HU-LSTM (Hybrid U-LSTM) to regularize 3D matching volume into predicted depth map, which efficiently aggregates different scale information by coupling LSTM and U-Net architecture. To further improve the accuracy and completeness of reconstructed point clouds, we leverage a dynamic consistency checking strategy instead of prefixed parameters and strategies widely adopted in existing methods for dense point cloud reconstruction. In doing so, we dynamically aggregate geometric consistency matching error among all the views. Our method ranks \textbf{$1^{st}$} on the complex outdoor \textsl{Tanks and Temples} benchmark over all the methods. Extensive experiments on the in-door DTU dataset show our method exhibits competitive performance to the state-of-the-art method while dramatically reduces memory consumption, which costs only $19.4\%$ of R-MVSNet memory consumption. The codebase is available at \hyperlink{https://github.com/yhw-yhw/D2HC-RMVSNet}{https://github.com/yhw-yhw/D2HC-RMVSNet}.