 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Reinforcement Learning for Wireless Scheduling in Distributed Networked Control
Paper and Code
Sep 26, 2021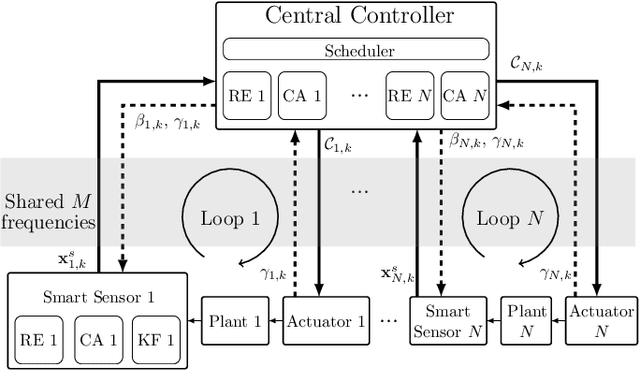

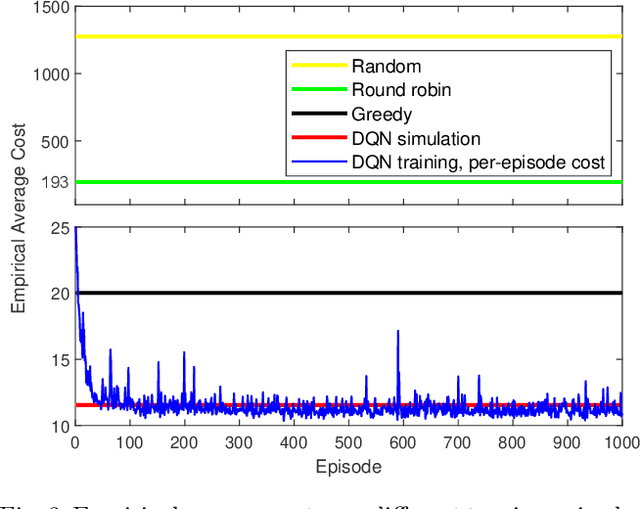
In the literature of transmission scheduling in wireless networked control systems (WNCSs) over shared wireless resources, most research works have focused on partially distributed settings, i.e., where either the controller and actuator, or the sensor and controller are co-located. To overcome this limitation, the present work considers a fully distributed WNCS with distributed plants, sensors, actuators and a controller, sharing a limited number of frequency channels. To overcome communication limitations, the controller schedules the transmissions and generates sequential predictive commands for control. Using elements of stochastic systems theory, we derive a sufficient stability condition of the WNCS, which is stated in terms of both the control and communication system parameters. Once the condition is satisfied, there exists at least one stationary and deterministic scheduling policy that can stabilize all plants of the WNCS. By analyzing and representing the per-step cost function of the WNCS in terms of a finite-length countable vector state, we formulate the optimal transmission scheduling problem into a Markov decision process problem and develop a deep-reinforcement-learning-based algorithm for solving it. Numerical results show that the proposed algorithm significantly outperforms the benchmark policies.