 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDCMS: Motion Forecasting with Dual Consistency and Multi-Pseudo-Target Supervision
Paper and Code
Apr 12, 2022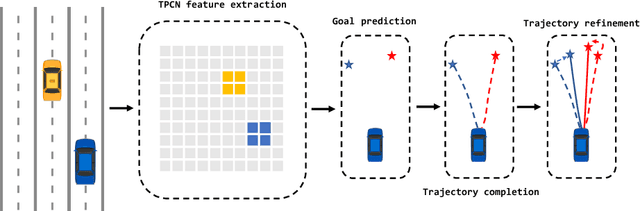
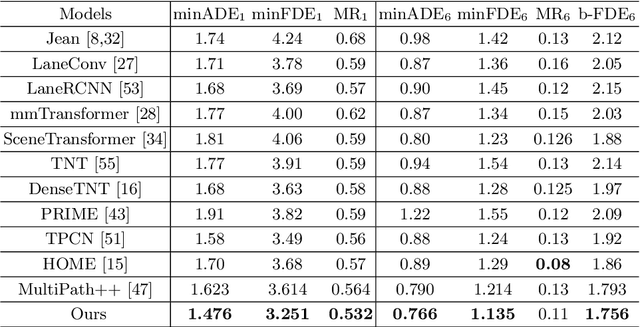
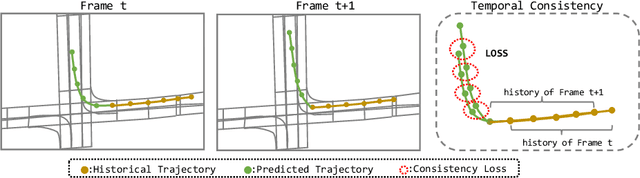
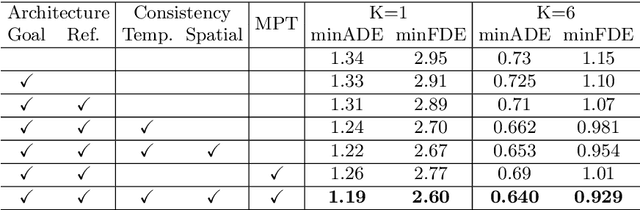
We present a novel framework for motion forecasting with Dual Consistency Constraints and Multi-Pseudo-Target supervision. The motion forecasting task predicts future trajectories of vehicles by incorporating spatial and temporal information from the past. A key design of DCMS is the proposed Dual Consistency Constraints that regularize the predicted trajectories under spatial and temporal perturbation during the training stage. In addition, we design a novel self-ensembling scheme to obtain accurate pseudo targets to model the multi-modality in motion forecasting through supervision with multiple targets explicitly, namely Multi-Pseudo-Target supervision. Our experimental results on the Argoverse motion forecasting benchmark show that DCMS significantly outperforms the state-of-the-art methods, achieving 1st place on the leaderboard. We also demonstrate that our proposed strategies can be incorporated into other motion forecasting approaches as general training schemes.