 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCurbNet: Curb Detection Framework Based on LiDAR Point Cloud Segmentation
Paper and Code
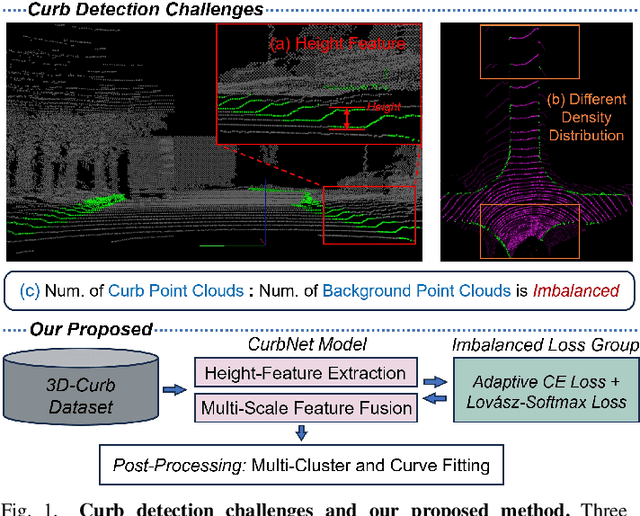
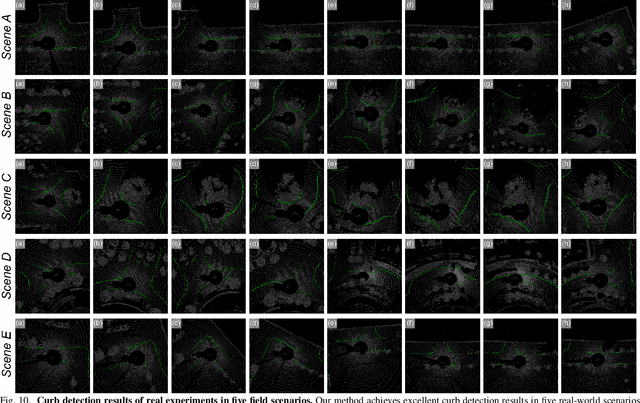
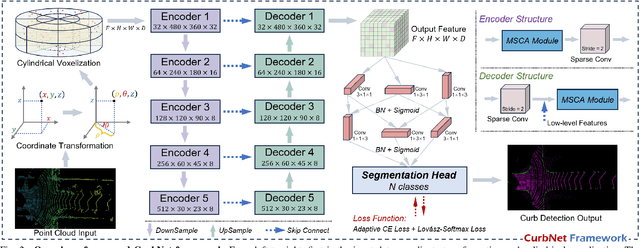
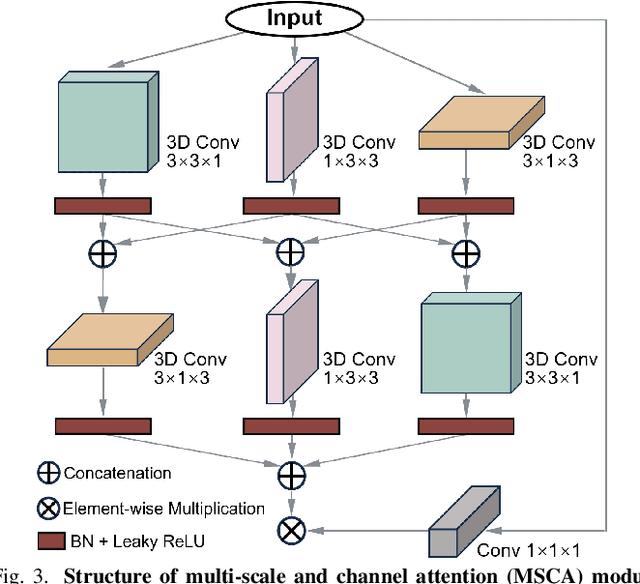
Curb detection is an important function in intelligent driving and can be used to determine drivable areas of the road. However, curbs are difficult to detect due to the complex road environment. This paper introduces CurbNet, a novel framework for curb detection, leveraging point cloud segmentation. Addressing the dearth of comprehensive curb datasets and the absence of 3D annotations, we have developed the 3D-Curb dataset, encompassing 7,100 frames, which represents the largest and most categorically diverse collection of curb point clouds currently available. Recognizing that curbs are primarily characterized by height variations, our approach harnesses spatially-rich 3D point clouds for training. To tackle the challenges presented by the uneven distribution of curb features on the xy-plane and their reliance on z-axis high-frequency features, we introduce the multi-scale and channel attention (MSCA) module, a bespoke solution designed to optimize detection performance. Moreover, we propose an adaptive weighted loss function group, specifically formulated to counteract the imbalance in the distribution of curb point clouds relative to other categories. Our extensive experimentation on 2 major datasets has yielded results that surpass existing benchmarks set by leading curb detection and point cloud segmentation models. By integrating multi-clustering and curve fitting techniques in our post-processing stage, we have substantially reduced noise in curb detection, thereby enhancing precision to 0.8744. Notably, CurbNet has achieved an exceptional average metrics of over 0.95 at a tolerance of just 0.15m, thereby establishing a new benchmark. Furthermore, corroborative real-world experiments and dataset analyzes mutually validate each other, solidifying CurbNet's superior detection proficiency and its robust generalizability.