 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCOTReg:Coupled Optimal Transport based Point Cloud Registration
Paper and Code
Dec 29, 2021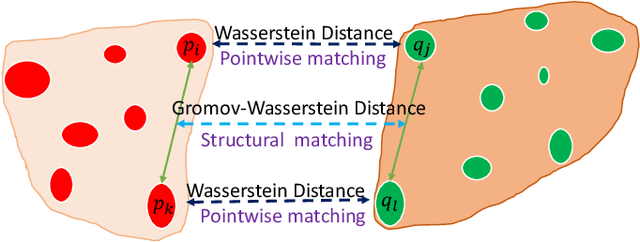

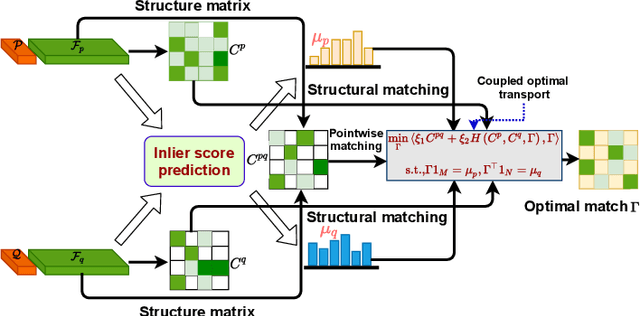
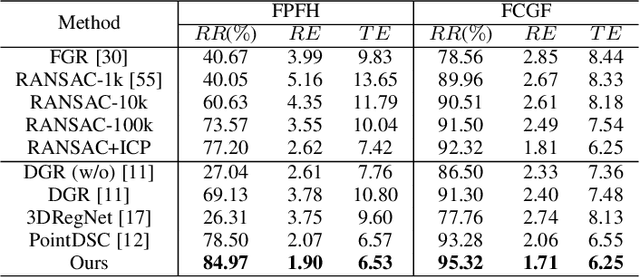
Generating a set of high-quality correspondences or matches is one of the most critical steps in point cloud registration. This paper proposes a learning framework COTReg by jointly considering the pointwise and structural matchings to predict correspondences of 3D point cloud registration. Specifically, we transform the two matchings into a Wasserstein distance-based and a Gromov-Wasserstein distance-based optimizations, respectively. Thus the task of establishing the correspondences can be naturally reshaped to a coupled optimal transport problem. Furthermore, we design a network to predict the confidence score of being an inlier for each point of the point clouds, which provides the overlap region information to generate correspondences. Our correspondence prediction pipeline can be easily integrated into either learning-based features like FCGF or traditional descriptors like FPFH. We conducted comprehensive experiments on 3DMatch, KITTI, 3DCSR, and ModelNet40 benchmarks, showing the state-of-art performance of the proposed method.