 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControlVAE: Tuning, Analytical Properties, and Performance Analysis
Paper and Code
Oct 31, 2020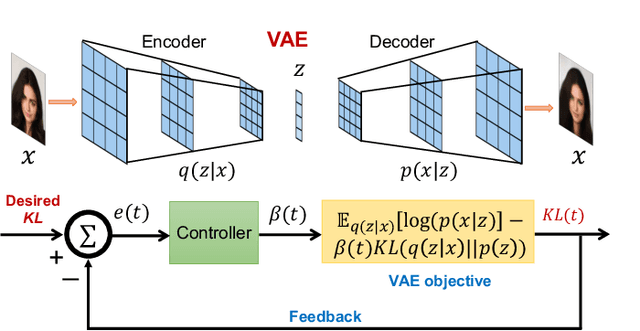
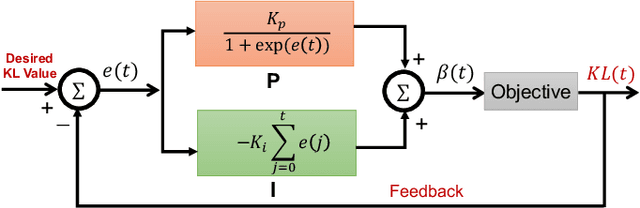
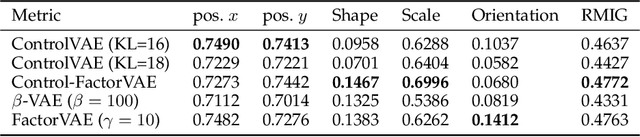
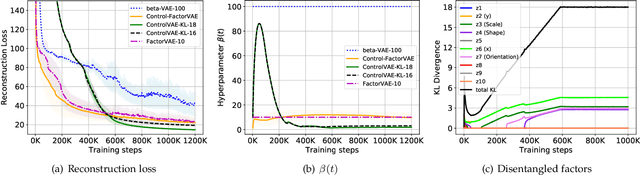
This paper reviews the novel concept of controllable variational autoencoder (ControlVAE), discusses its parameter tuning to meet application needs, derives its key analytic properties, and offers useful extensions and applications. ControlVAE is a new variational autoencoder (VAE) framework that combines the automatic control theory with the basic VAE to stabilize the KL-divergence of VAE models to a specified value. It leverages a non-linear PI controller, a variant of the proportional-integral-derivative (PID) control, to dynamically tune the weight of the KL-divergence term in the evidence lower bound (ELBO) using the output KL-divergence as feedback. This allows us to precisely control the KL-divergence to a desired value (set point), which is effective in avoiding posterior collapse and learning disentangled representations. In order to improve the ELBO over the regular VAE, we provide simplified theoretical analysis to inform setting the set point of KL-divergence for ControlVAE. We observe that compared to other methods that seek to balance the two terms in VAE's objective, ControlVAE leads to better learning dynamics. In particular, it can achieve a good trade-off between reconstruction quality and KL-divergence. We evaluate the proposed method on three tasks: image generation, language modeling and disentangled representation learning. The results show that ControlVAE can achieve much better reconstruction quality than the other methods for comparable disentanglement. On the language modeling task, ControlVAE can avoid posterior collapse (KL vanishing) and improve the diversity of generated text. Moreover, our method can change the optimization trajectory, improving the ELBO and the reconstruction quality for image generation.