 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConservative Safety Critics for Exploration
Paper and Code
Oct 27, 2020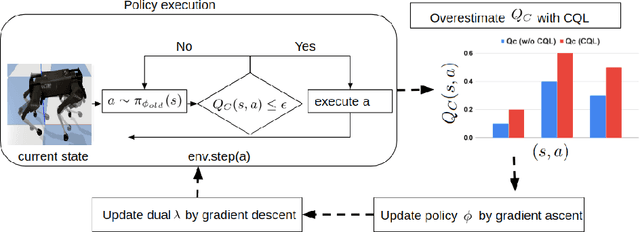

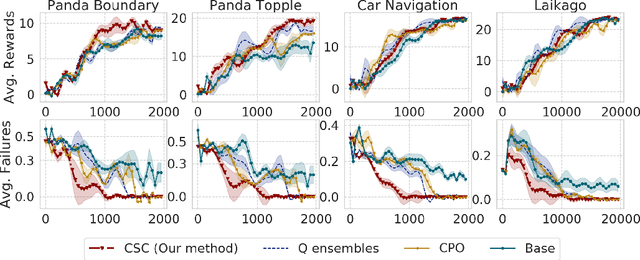
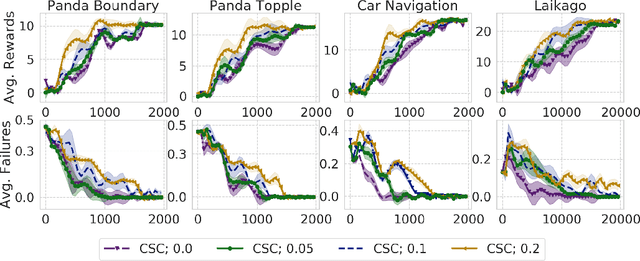
Safe exploration presents a major challenge in reinforcement learning (RL): when active data collection requires deploying partially trained policies, we must ensure that these policies avoid catastrophically unsafe regions, while still enabling trial and error learning. In this paper, we target the problem of safe exploration in RL by learning a conservative safety estimate of environment states through a critic, and provably upper bound the likelihood of catastrophic failures at every training iteration. We theoretically characterize the tradeoff between safety and policy improvement, show that the safety constraints are likely to be satisfied with high probability during training, derive provable convergence guarantees for our approach, which is no worse asymptotically than standard RL, and demonstrate the efficacy of the proposed approach on a suite of challenging navigation, manipulation, and locomotion tasks. Empirically, we show that the proposed approach can achieve competitive task performance while incurring significantly lower catastrophic failure rates during training than prior methods. Videos are at this url https://sites.google.com/view/conservative-safety-critics/home