 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsensus Synergizes with Memory: A Simple Approach for Anomaly Segmentation in Urban Scenes
Paper and Code
Nov 24, 2021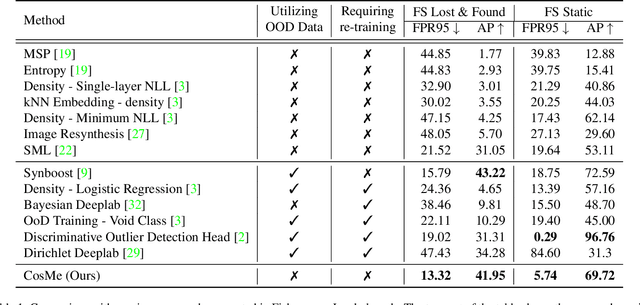
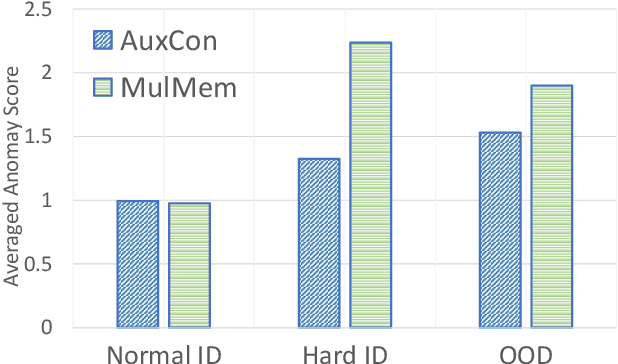
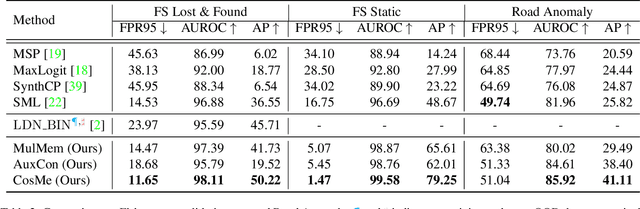
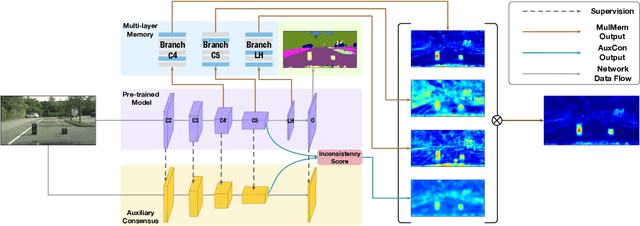
Anomaly segmentation is a crucial task for safety-critical applications, such as autonomous driving in urban scenes, where the goal is to detect out-of-distribution (OOD) objects with categories which are unseen during training. The core challenge of this task is how to distinguish hard in-distribution samples from OOD samples, which has not been explicitly discussed yet. In this paper, we propose a novel and simple approach named Consensus Synergizes with Memory (CosMe) to address this challenge, inspired by the psychology finding that groups perform better than individuals on memory tasks. The main idea is 1) building a memory bank which consists of seen prototypes extracted from multiple layers of the pre-trained segmentation model and 2) training an auxiliary model that mimics the behavior of the pre-trained model, and then measuring the consensus of their mid-level features as complementary cues that synergize with the memory bank. CosMe is good at distinguishing between hard in-distribution examples and OOD samples. Experimental results on several urban scene anomaly segmentation datasets show that CosMe outperforms previous approaches by large margins.