 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsensus Learning for Cooperative Multi-Agent Reinforcement Learning
Paper and Code
Jun 06, 2022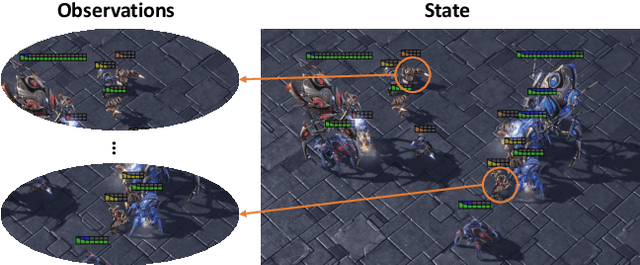
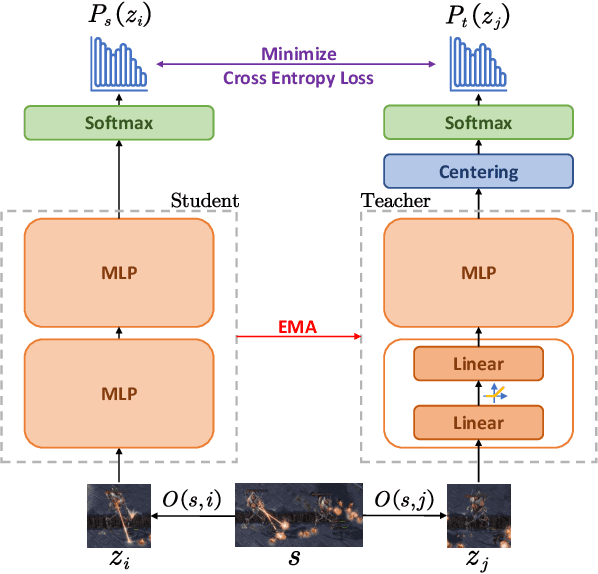


Almost all multi-agent reinforcement learning algorithms without communication follow the principle of centralized training with decentralized execution. During centralized training, agents can be guided by the same signals, such as the global state. During decentralized execution, however, agents lack the shared signal. Inspired by viewpoint invariance and contrastive learning, we propose consensus learning for cooperative multi-agent reinforcement learning in this paper. Although based on local observations, different agents can infer the same consensus in discrete space. During decentralized execution, we feed the inferred consensus as an explicit input to the network of agents, thereby developing their spirit of cooperation. Our proposed method can be extended to various multi-agent reinforcement learning algorithms. Moreover, we carry out them on some fully cooperative tasks and get convincing results.