 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputationally-Robust and Efficient Prioritized Whole-Body Controller with Contact Constraints
Paper and Code
Jul 03, 2018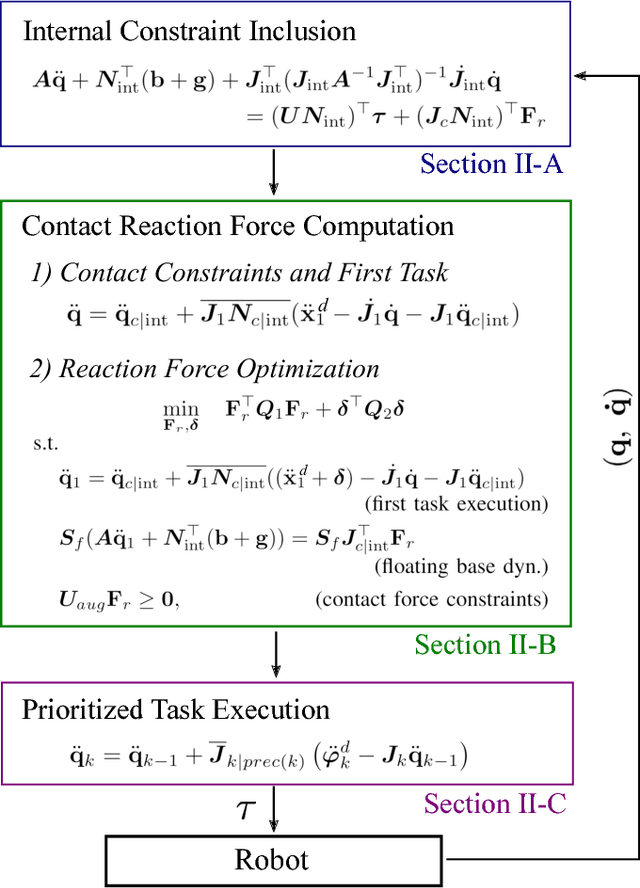
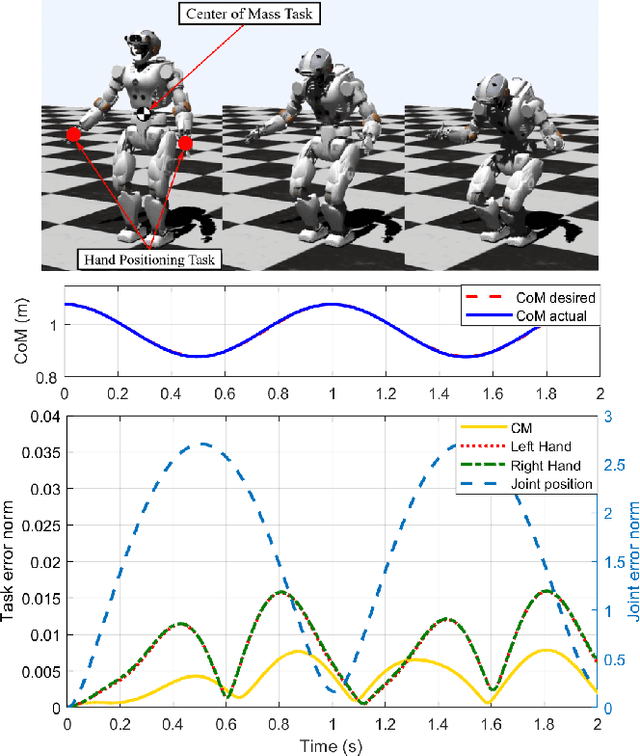

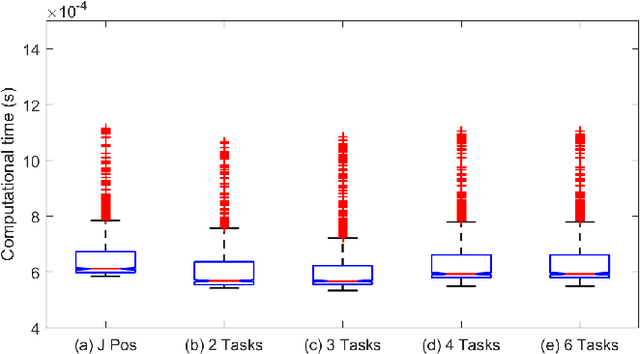
In this paper, we devise methods for the multi- objective control of humanoid robots, a.k.a. prioritized whole- body controllers, that achieve efficiency and robustness in the algorithmic computations. We use a form of whole-body controllers that is very general via incorporating centroidal momentum dynamics, operational task priorities, contact re- action forces, and internal force constraints. First, we achieve efficiency by solving a quadratic program that only involves the floating base dynamics and the reaction forces. Second, we achieve computational robustness by relaxing task accelerations such that they comply with friction cone constraints. Finally, we incorporate methods for smooth contact transitions to enhance the control of dynamic locomotion behaviors. The proposed methods are demonstrated both in simulation and in real experiments using a passive-ankle bipedal robot.