 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoboGuider: Haptic Potential Fields for Safe Human-Robot Interaction
Paper and Code
Oct 25, 2021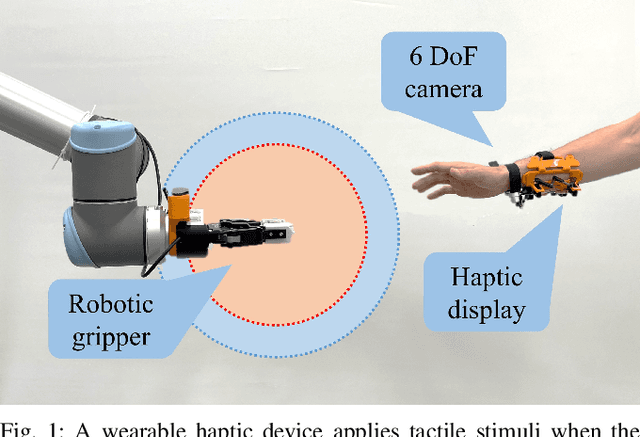
Modern industry still relies on manual manufacturing operations and safe human-robot interaction is of great interest nowadays. Speed and Separation Monitoring (SSM) allows close and efficient collaborative scenarios by maintaining a protective separation distance during robot operation. The paper focuses on a novel approach to strengthen the SSM safety requirements by introducing haptic feedback to a robotic cell worker. Tactile stimuli provide early warning of dangerous movements and proximity to the robot, based on the human reaction time and instantaneous velocities of robot and operator. A preliminary experiment was performed to identify the reaction time of participants when they are exposed to tactile stimuli in a collaborative environment with controlled conditions. In a second experiment, we evaluated our approach into a study case where human worker and cobot performed collaborative planetary gear assembly. Results show that the applied approach increased the average minimum distance between the robot's end-effector and hand by 44% compared to the operator relying only on the visual feedback. Moreover, the participants without the haptic support have failed several times to maintain the protective separation distance.