 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeChance constraint based multi agent navigation under uncertainty
Paper and Code
Aug 20, 2016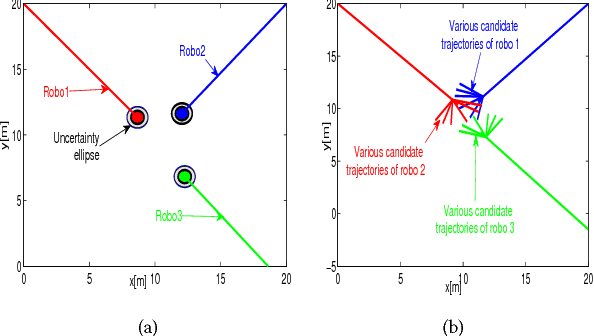
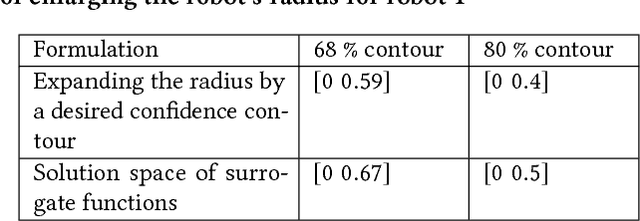
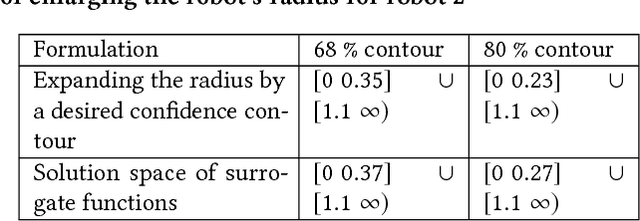
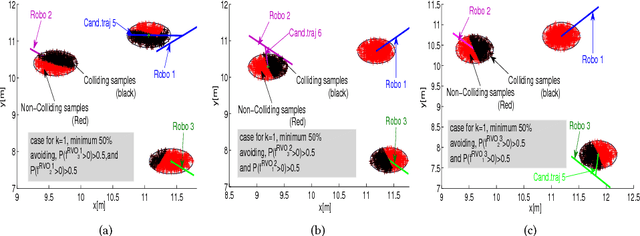
We present Probabilistic Reciprocal Velocity Obstacle or PRVO as a general algorithm for navigating multiple robots under perception and motion uncertainty. PRVO is defined as the space of velocities that ensures dynamic collision avoidance between a pair of robots with a specified probability. Our approach is based on defining chance constraints over the inequalities defined by the deterministic Reciprocal Velocity Obstacle (RVO). The computational complexity of the proposed probabilistic RVO is comparable to the deterministic counterpart. This is achieved by a series of reformulations where we first substitute the computationally intractable chance constraints with a family of surrogate constraints and then adopt a time scaling based solution methodology to efficiently characterize their solution space. Further, we also show that the solution space of each member of the family of surrogate constraints can be mapped in closed form to the probability with which the original chance constraints are satisfied and thus consequently to probability of collision avoidance. We validate our formulations through numerical simulations where we highlight the importance of incorporating the effect of motion uncertainty and the advantages of PRVO over existing formulations which handles the effect of uncertainty by using conservative bounding volumes.