 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCG-SLAM: Efficient Dense RGB-D SLAM in a Consistent Uncertainty-aware 3D Gaussian Field
Paper and Code
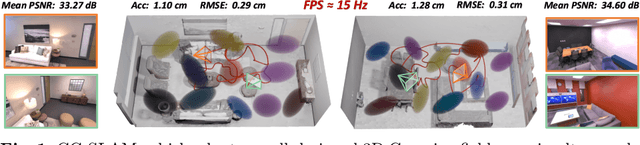
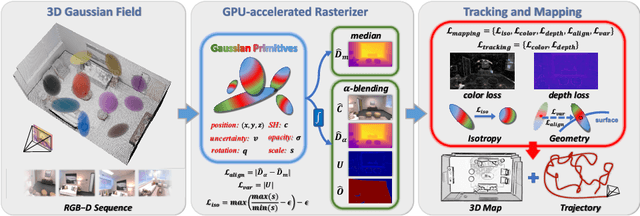
Recently neural radiance fields (NeRF) have been widely exploited as 3D representations for dense simultaneous localization and mapping (SLAM). Despite their notable successes in surface modeling and novel view synthesis, existing NeRF-based methods are hindered by their computationally intensive and time-consuming volume rendering pipeline. This paper presents an efficient dense RGB-D SLAM system, i.e., CG-SLAM, based on a novel uncertainty-aware 3D Gaussian field with high consistency and geometric stability. Through an in-depth analysis of Gaussian Splatting, we propose several techniques to construct a consistent and stable 3D Gaussian field suitable for tracking and mapping. Additionally, a novel depth uncertainty model is proposed to ensure the selection of valuable Gaussian primitives during optimization, thereby improving tracking efficiency and accuracy. Experiments on various datasets demonstrate that CG-SLAM achieves superior tracking and mapping performance with a notable tracking speed of up to 15 Hz. We will make our source code publicly available. Project page: https://zju3dv.github.io/cg-slam.