 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCenter Focusing Network for Real-Time LiDAR Panoptic Segmentation
Paper and Code
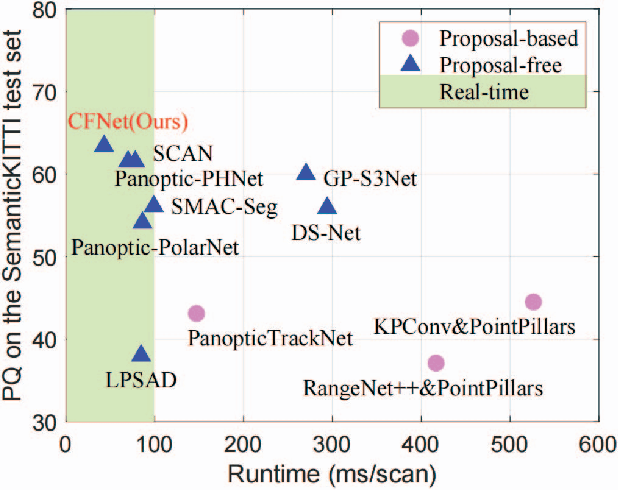
LiDAR panoptic segmentation facilitates an autonomous vehicle to comprehensively understand the surrounding objects and scenes and is required to run in real time. The recent proposal-free methods accelerate the algorithm, but their effectiveness and efficiency are still limited owing to the difficulty of modeling non-existent instance centers and the costly center-based clustering modules. To achieve accurate and real-time LiDAR panoptic segmentation, a novel center focusing network (CFNet) is introduced. Specifically, the center focusing feature encoding (CFFE) is proposed to explicitly understand the relationships between the original LiDAR points and virtual instance centers by shifting the LiDAR points and filling in the center points. Moreover, to leverage the redundantly detected centers, a fast center deduplication module (CDM) is proposed to select only one center for each instance. Experiments on the SemanticKITTI and nuScenes panoptic segmentation benchmarks demonstrate that our CFNet outperforms all existing methods by a large margin and is 1.6 times faster than the most efficient method. The code is available at https://github.com/GangZhang842/CFNet.