 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCategory-Level Pose Retrieval with Contrastive Features Learnt with Occlusion Augmentation
Paper and Code
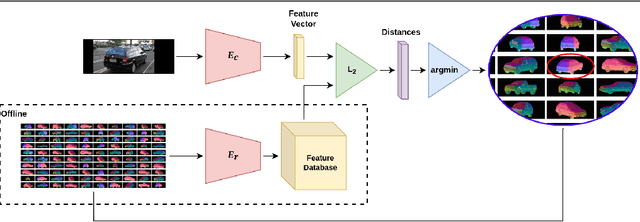
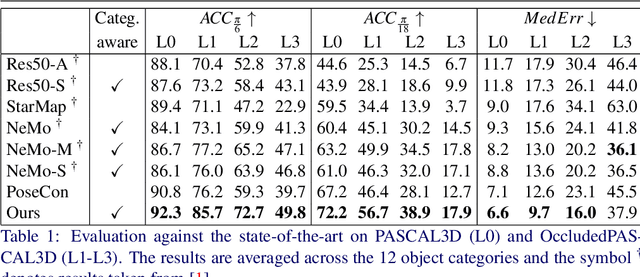
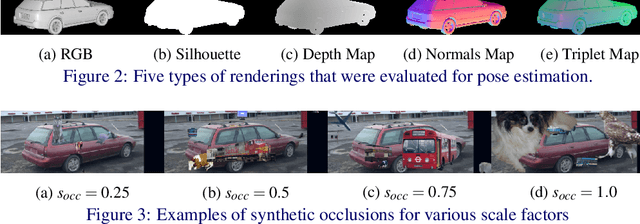
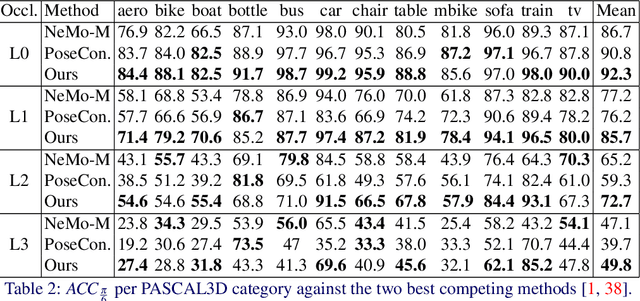
Pose estimation is usually tackled as either a bin classification problem or as a regression problem. In both cases, the idea is to directly predict the pose of an object. This is a non-trivial task because of appearance variations of similar poses and similarities between different poses. Instead, we follow the key idea that it is easier to compare two poses than to estimate them. Render-and-compare approaches have been employed to that end, however, they tend to be unstable, computationally expensive, and slow for real-time applications. We propose doing category-level pose estimation by learning an alignment metric using a contrastive loss with a dynamic margin and a continuous pose-label space. For efficient inference, we use a simple real-time image retrieval scheme with a reference set of renderings projected to an embedding space. To achieve robustness to real-world conditions, we employ synthetic occlusions, bounding box perturbations, and appearance augmentations. Our approach achieves state-of-the-art performance on PASCAL3D and OccludedPASCAL3D, as well as high-quality results on KITTI3D.