 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAE-RLSM: Consistent and Efficient Redundant Line Segment Merging for Online Feature Map Building
Paper and Code


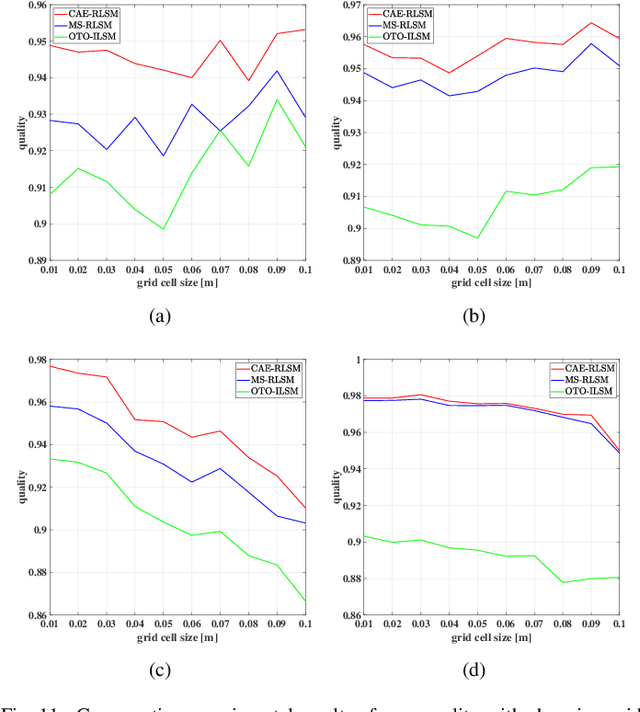

In order to obtain a compact line segment-based map representation for localization and planning of mobile robots, it is necessary to merge redundant line segments which physically represent the same part of the environment in different scans. In this paper, a consistent and efficient redundant line segment merging approach (CAE-RLSM) is proposed for online feature map building. The proposed CAE-RLSM is composed of two newly proposed modules: one-to-many incremental line segment merging (OTM-ILSM) and multi-processing global map adjustment (MP-GMA). Different from state-of-the-art offline merging approaches, the proposed CAE-RLSM can achieve real-time mapping performance, which not only reduces the redundancy of incremental merging with high efficiency, but also solves the problem of global map adjustment after loop closing to guarantee global consistency. Furthermore, a new correlation-based evaluation metric is proposed for the quality evaluation of line segment maps. This evaluation metric does not require manual measurement of the environmental metric information, instead it makes full use of globally consistent laser scans obtained by simultaneous localization and mapping (SLAM) systems to compare the performance of different line segment-based mapping approaches in an objective and fair manner. Comparative experimental results with respect to a mean shift-based offline redundant line segment merging approach (MS-RLSM) and an offline version of one-to-one incremental line segment merging approach (OTO-ILSM) on both public data sets and self-recorded data set are presented to show the superior performance of CAE-RLSM in terms of efficiency and map quality in different scenarios.