 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging the Gap Between Safety and Real-Time Performance in Receding-Horizon Trajectory Design for Mobile Robots
Paper and Code
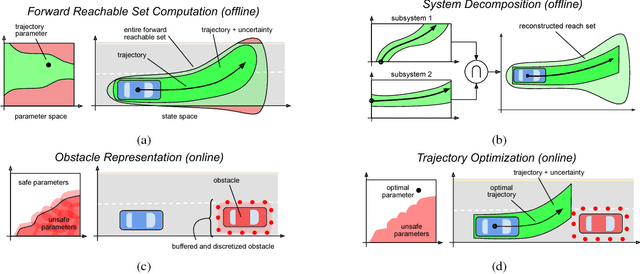
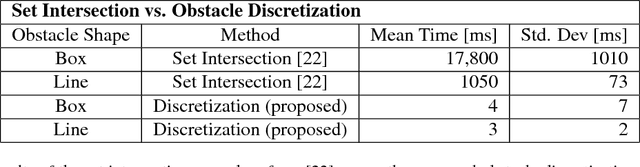
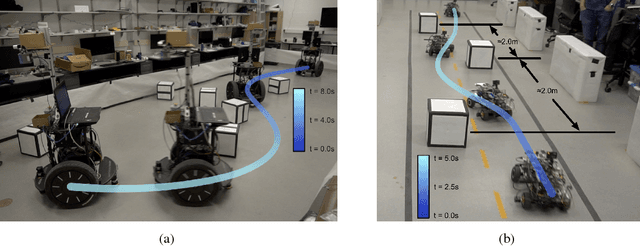
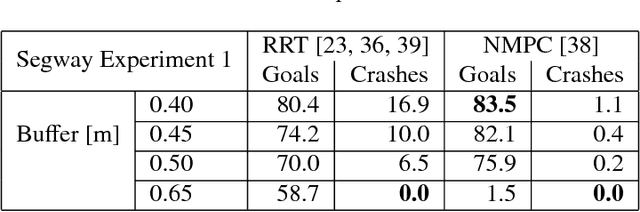
Autonomous mobile robots must operate with limited sensor horizons in unpredictable environments. To do so, they use a receding-horizon strategy to plan trajectories, by executing a short plan while creating the next plan. However, creating safe, dynamically-feasible trajectories in real time is challenging; and, planners must ensure that they are persistently feasible, meaning that a new trajectory is always available before the previous one has finished executing. Existing approaches make a tradeoff between model complexity and planning speed, which can require sacrificing guarantees of safety and dynamic feasibility. This work presents the Reachability-based Trajectory Design (RTD) method for trajectory planning. RTD begins with an offline Forward Reachable Set (FRS) computation of a robot's motion while it tracks parameterized trajectories; the FRS also provably bounds tracking error. At runtime, the FRS is used to map obstacles to the space of parameterized trajectories, which allows RTD to select a safe trajectory at every planning iteration. RTD prescribes a method of representing obstacles to ensure that these constraints can be created and evaluated in real time while maintaining provable safety. Persistent feasibility is achieved by prescribing a minimum duration of planned trajectories, and a minimum sensor horizon. A system decomposition approach is used to increase the dimension of the parameterized trajectories in the FRS, allowing for RTD to create more complex plans at runtime. RTD is compared in simulation with Rapidly-exploring Random Trees (RRT) and Nonlinear Model-Predictive Control (NMPC). RTD is also demonstrated on two hardware platforms in randomly-crafted environments: a differential-drive Segway, and a car-like Rover. The proposed method is shown as safe and persistently feasible across thousands of simulations and dozens of hardware demos.