 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBipedal Locomotion with Nonlinear Model Predictive Control: Online Gait Generation using Whole-Body Dynamics
Paper and Code
Mar 14, 2022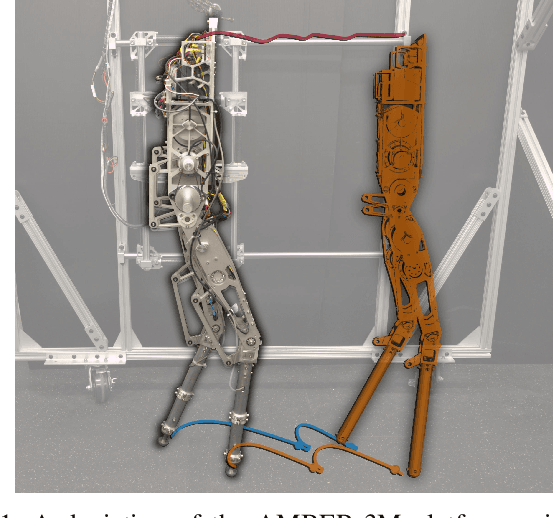



The ability to generate dynamic walking in real-time for bipedal robots with compliance and underactuation has the potential to enable locomotion in complex and unstructured environments. Yet, the high-dimensional nature of bipedal robots has limited the use of full-order rigid body dynamics to gaits which are synthesized offline and then tracked online, e.g., via whole-body controllers. In this work we develop an online nonlinear model predictive control approach that leverages the full-order dynamics to realize diverse walking behaviors. Additionally, this approach can be coupled with gaits synthesized offline via a terminal cost that enables a shorter prediction horizon; this makes rapid online re-planning feasible and bridges the gap between online reactive control and offline gait planning. We demonstrate the proposed method on the planar robot AMBER-3M, both in simulation and on hardware.