 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiConMP: A Nonlinear Model Predictive Control Framework for Whole Body Motion Planning
Paper and Code
Jan 19, 2022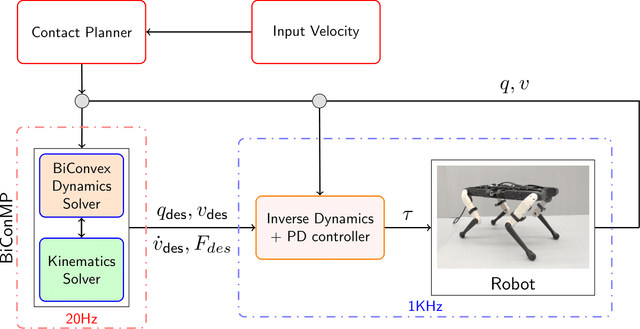
Online planning of whole-body motions for legged robots is challenging due to the inherent nonlinearity in the robot dynamics. In this work, we propose a nonlinear MPC framework, the BiConMP which can generate whole body trajectories online by efficiently exploiting the structure of the robot dynamics. BiConMP is used to generate various cyclic gaits on a real quadruped robot and its performance is evaluated on different terrain, countering unforeseen pushes and transitioning online between different gaits. Further, the ability of BiConMP to generate non-trivial acyclic whole-body dynamic motions on the robot is presented. Finally, an extensive empirical analysis on the effects of planning horizon and frequency on the nonlinear MPC framework is reported and discussed.