 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking In-Hand Manipulation
Paper and Code
Jan 09, 2020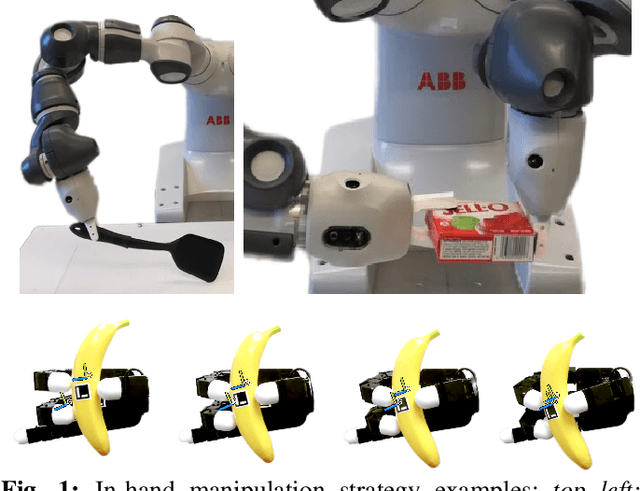
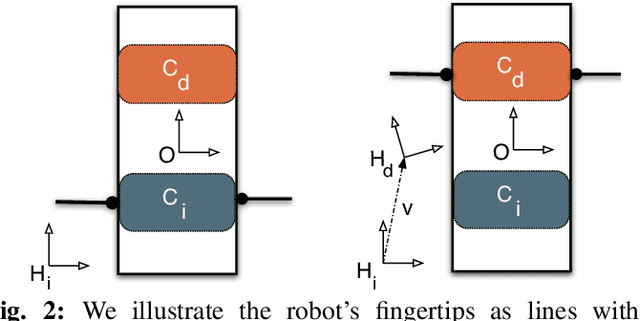
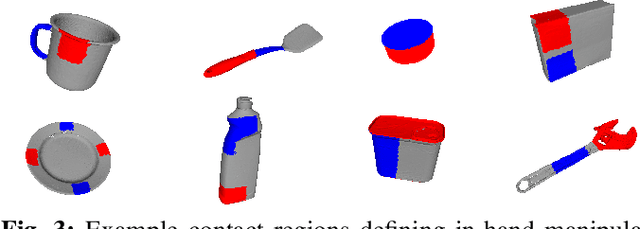
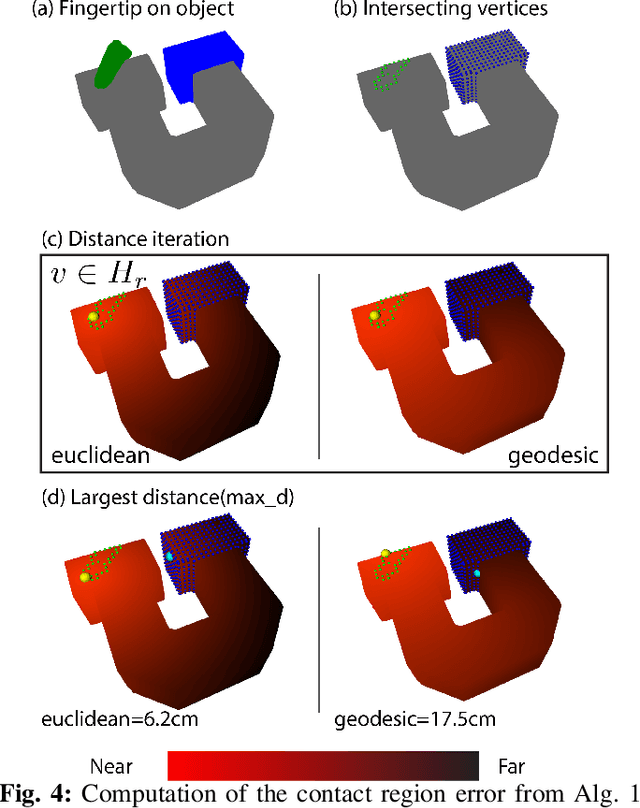
The purpose of this benchmark is to evaluate the planning and control aspects of robotic in-hand manipulation systems. The goal is to assess the system's ability to change the pose of a hand-held object by either using the fingers, environment or a combination of both. Given an object surface mesh from the YCB data-set, we provide examples of initial and goal states (i.e.\ static object poses and fingertip locations) for various in-hand manipulation tasks. We further propose metrics that measure the error in reaching the goal state from a specific initial state, which, when aggregated across all tasks, also serves as a measure of the system's in-hand manipulation capability. We provide supporting software, task examples, and evaluation results associated with the benchmark. All the supporting material is available at https://robot-learning.cs.utah.edu/project/benchmarking_in_hand_manipulation