 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Constraint Inference in Inverse Reinforcement Learning
Paper and Code
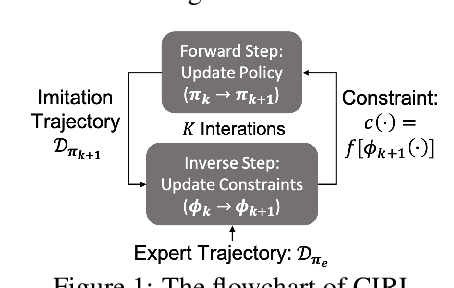
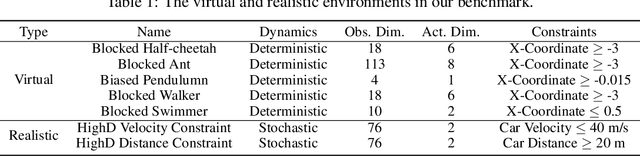
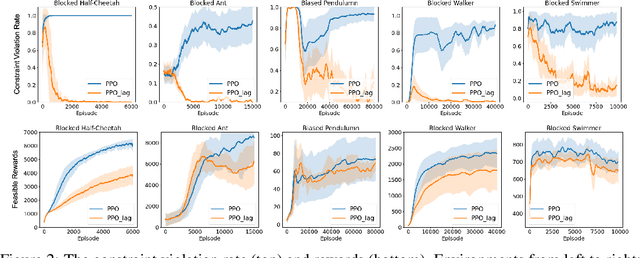

When deploying Reinforcement Learning (RL) agents into a physical system, we must ensure that these agents are well aware of the underlying constraints. In many real-world problems, however, the constraints followed by expert agents (e.g., humans) are often hard to specify mathematically and unknown to the RL agents. To tackle these issues, Constraint Inverse Reinforcement Learning (CIRL) considers the formalism of Constrained Markov Decision Processes (CMDPs) and estimates constraints from expert demonstrations by learning a constraint function. As an emerging research topic, CIRL does not have common benchmarks, and previous works tested their algorithms with hand-crafted environments (e.g., grid worlds). In this paper, we construct a CIRL benchmark in the context of two major application domains: robot control and autonomous driving. We design relevant constraints for each environment and empirically study the ability of different algorithms to recover those constraints based on expert trajectories that respect those constraints. To handle stochastic dynamics, we propose a variational approach that infers constraint distributions, and we demonstrate its performance by comparing it with other CIRL baselines on our benchmark. The benchmark, including the information for reproducing the performance of CIRL algorithms, is publicly available at https://github.com/Guiliang/CIRL-benchmarks-public