Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBalancing Shared Autonomy with Human-Robot Communication
Paper and Code
May 20, 2018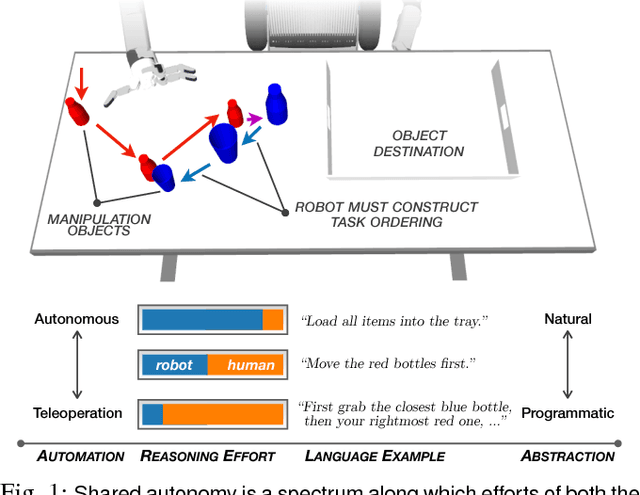
Robotic agents that share autonomy with a human should leverage human domain knowledge and account for their preferences when completing a task. This extra knowledge can dramatically improve plan efficiency and user-satisfaction, but these gains are lost if communicating with a robot is taxing and unnatural. In this paper, we show how viewing humanrobot language through the lens of shared autonomy explains the efficiency versus cognitive load trade-offs humans make when deciding how cooperative and explicit to make their instructions.
View paper on