 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBackward Reachability Analysis of Neural Feedback Loops: Techniques for Linear and Nonlinear Systems
Paper and Code
Sep 28, 2022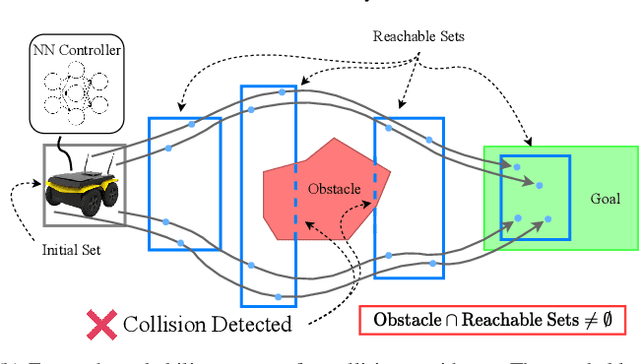
The increasing prevalence of neural networks (NNs) in safety-critical applications calls for methods to certify safe behavior. This paper presents a backward reachability approach for safety verification of neural feedback loops (NFLs), i.e., closed-loop systems with NN control policies. While recent works have focused on forward reachability as a strategy for safety certification of NFLs, backward reachability offers advantages over the forward strategy, particularly in obstacle avoidance scenarios. Prior works have developed techniques for backward reachability analysis for systems without NNs, but the presence of NNs in the feedback loop presents a unique set of problems due to the nonlinearities in their activation functions and because NN models are generally not invertible. To overcome these challenges, we use existing forward NN analysis tools to efficiently find an over-approximation of the backprojection (BP) set, i.e., the set of states for which the NN control policy will drive the system to a given target set. We present frameworks for calculating BP over-approximations for both linear and nonlinear systems with control policies represented by feedforward NNs and propose computationally efficient strategies. We use numerical results from a variety of models to showcase the proposed algorithms, including a demonstration of safety certification for a 6D system.