 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous drone cinematographer: Using artistic principles to create smooth, safe, occlusion-free trajectories for aerial filming
Paper and Code
Aug 28, 2018
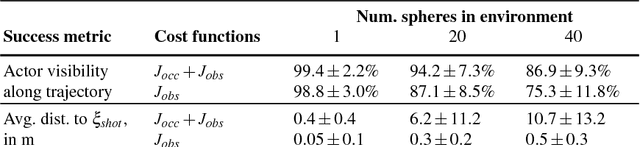


Autonomous aerial cinematography has the potential to enable automatic capture of aesthetically pleasing videos without requiring human intervention, empowering individuals with the capability of high-end film studios. Current approaches either only handle off-line trajectory generation, or offer strategies that reason over short time horizons and simplistic representations for obstacles, which result in jerky movement and low real-life applicability. In this work we develop a method for aerial filming that is able to trade off shot smoothness, occlusion, and cinematography guidelines in a principled manner, even under noisy actor predictions. We present a novel algorithm for real-time covariant gradient descent that we use to efficiently find the desired trajectories by optimizing a set of cost functions. Experimental results show that our approach creates attractive shots, avoiding obstacles and occlusion 65 times over 1.25 hours of flight time, re-planning at 5 Hz with a 10 s time horizon. We robustly film human actors, cars and bicycles performing different motion among obstacles, using various shot types.