 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomated Urban Planning aware Spatial Hierarchies and Human Instructions
Paper and Code
Sep 26, 2022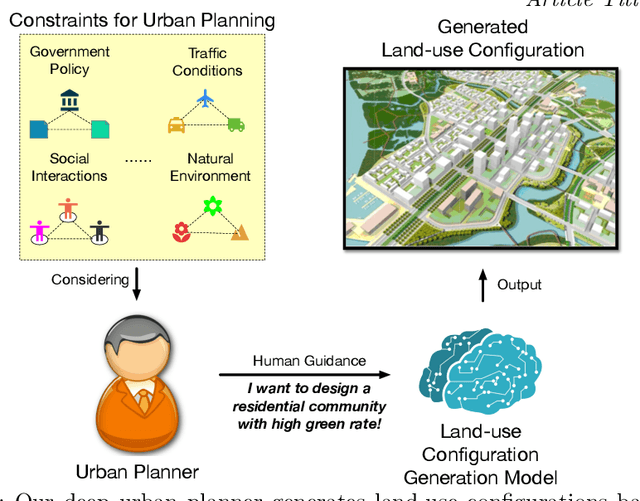
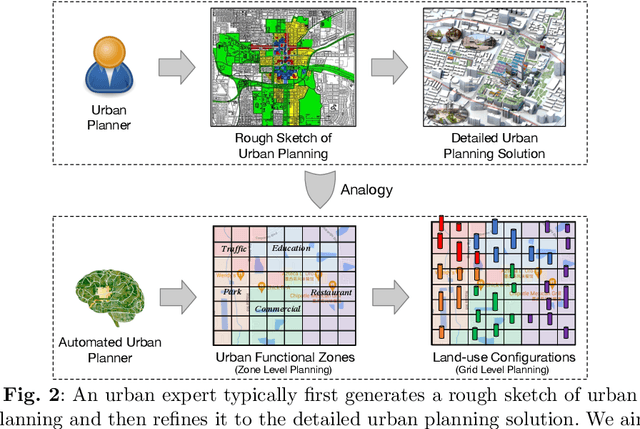
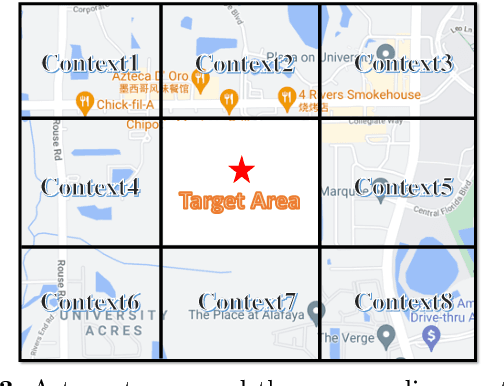
Traditional urban planning demands urban experts to spend considerable time and effort producing an optimal urban plan under many architectural constraints. The remarkable imaginative ability of deep generative learning provides hope for renovating urban planning. While automated urban planners have been examined, they are constrained because of the following: 1) neglecting human requirements in urban planning; 2) omitting spatial hierarchies in urban planning, and 3) lacking numerous urban plan data samples. To overcome these limitations, we propose a novel, deep, human-instructed urban planner. In the preliminary work, we formulate it into an encoder-decoder paradigm. The encoder is to learn the information distribution of surrounding contexts, human instructions, and land-use configuration. The decoder is to reconstruct the land-use configuration and the associated urban functional zones. The reconstruction procedure will capture the spatial hierarchies between functional zones and spatial grids. Meanwhile, we introduce a variational Gaussian mechanism to mitigate the data sparsity issue. Even though early work has led to good results, the performance of generation is still unstable because the way spatial hierarchies are captured may lead to unclear optimization directions. In this journal version, we propose a cascading deep generative framework based on generative adversarial networks (GANs) to solve this problem, inspired by the workflow of urban experts. In particular, the purpose of the first GAN is to build urban functional zones based on information from human instructions and surrounding contexts. The second GAN will produce the land-use configuration based on the functional zones that have been constructed. Additionally, we provide a conditioning augmentation module to augment data samples. Finally, we conduct extensive experiments to validate the efficacy of our work.