 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAttention-based Reinforcement Learning for Real-Time UAV Semantic Communication
Paper and Code
May 22, 2021

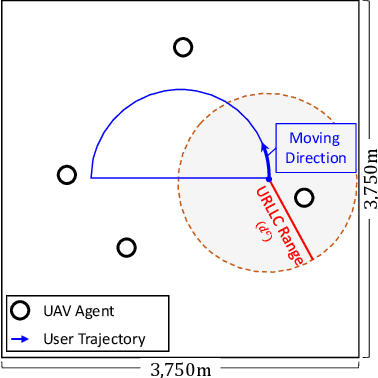

In this article, we study the problem of air-to-ground ultra-reliable and low-latency communication (URLLC) for a moving ground user. This is done by controlling multiple unmanned aerial vehicles (UAVs) in real time while avoiding inter-UAV collisions. To this end, we propose a novel multi-agent deep reinforcement learning (MADRL) framework, coined a graph attention exchange network (GAXNet). In GAXNet, each UAV constructs an attention graph locally measuring the level of attention to its neighboring UAVs, while exchanging the attention weights with other UAVs so as to reduce the attention mismatch between them. Simulation results corroborates that GAXNet achieves up to 4.5x higher rewards during training. At execution, without incurring inter-UAV collisions, GAXNet achieves 6.5x lower latency with the target 0.0000001 error rate, compared to a state-of-the-art baseline framework.