 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeASAP: Architecture Search, Anneal and Prune
Paper and Code

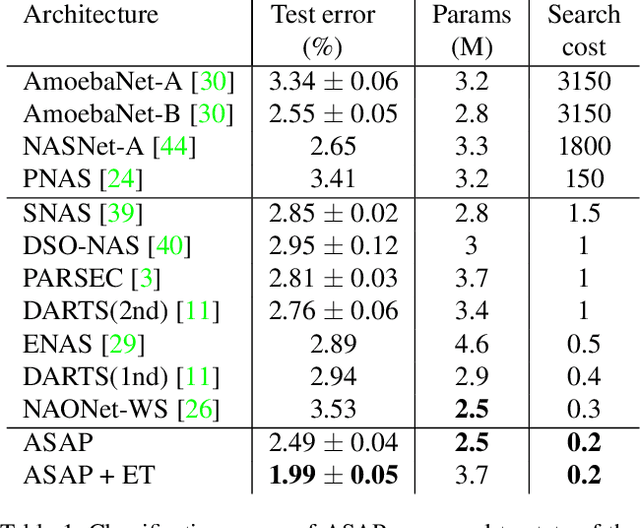
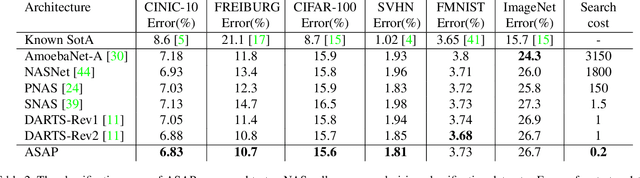
Automatic methods for Neural Architecture Search (NAS) have been shown to produce state-of-the-art network models, yet, their main drawback is the computational complexity of the search process. As some primal methods optimized over a discrete search space, thousands of days of GPU were required for convergence. A recent approach is based on constructing a differentiable search space that enables gradient-based optimization, thus reducing the search time to a few days. While successful, such methods still include some incontinuous steps, e.g., the pruning of many weak connections at once. In this paper, we propose a differentiable search space that allows the annealing of architecture weights, while gradually pruning inferior operations, thus the search converges to a single output network in a continuous manner. Experiments on several vision datasets demonstrate the effectiveness of our method with respect to the search cost, accuracy and the memory footprint of the achieved model.