 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAPP-Net: Auxiliary-point-based Push and Pull Operations for Efficient Point Cloud Classification
Paper and Code
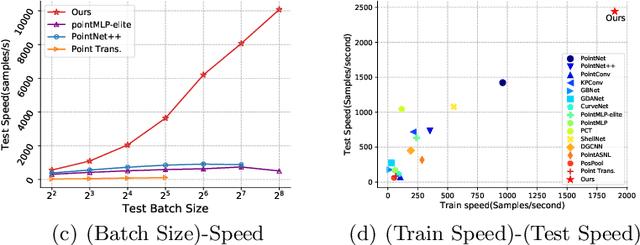
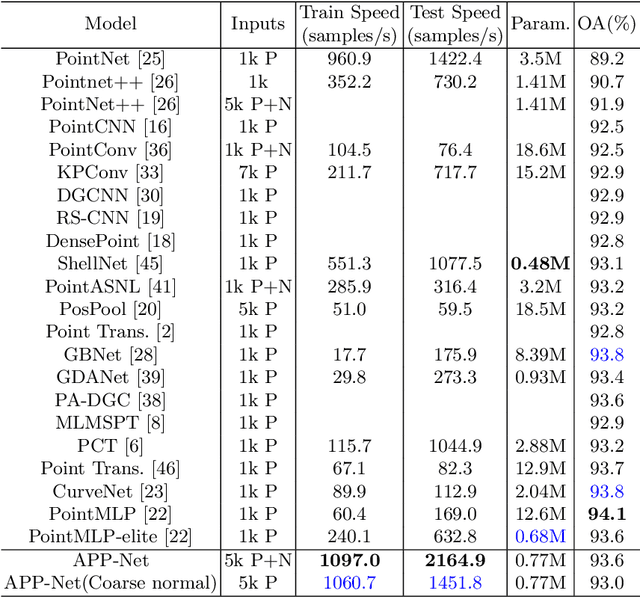
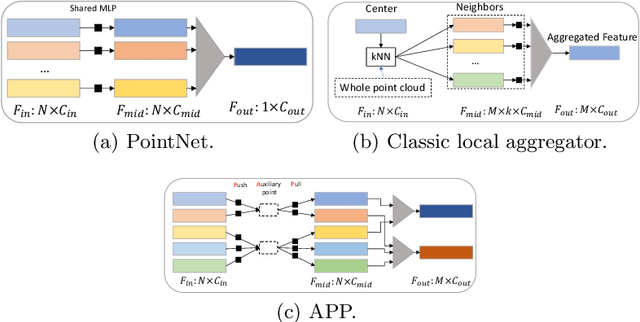
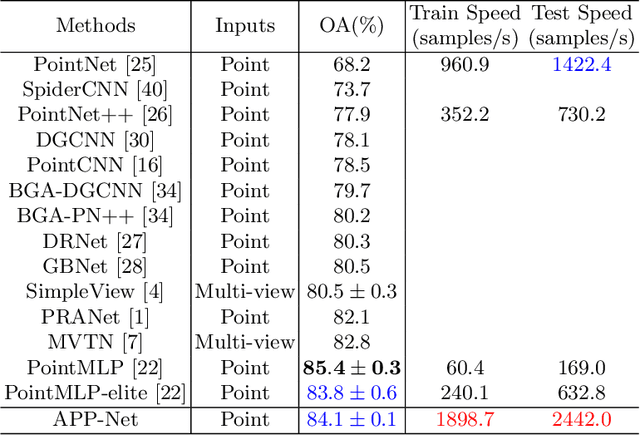
Point-cloud-based 3D classification task involves aggregating features from neighbor points. In previous works, each source point is often selected as a neighbor by multiple center points. Thus each source point has to participate in calculation multiple times with high memory consumption. Meanwhile, to pursue higher accuracy, these methods rely on a complex local aggregator to extract fine geometric representation, which slows down the network. To address these issues, we propose a new local aggregator of linear complexity, coined as APP. Specifically, we introduce an auxiliary container as an anchor to exchange features between the source point and the aggregating center. Each source point pushes its feature to only one auxiliary container, and each center point pulls features from only one auxiliary container. This avoids the re-computation of each source point. To facilitate the learning of the local structure, we use an online normal estimation module to provide the explainable geometric information to enhance our APP modeling capability. The constructed network is more efficient than all the previous baselines with a clear margin while only occupying a low memory. Experiments on both synthetic and real datasets verify that APP-Net reaches comparable accuracies with other networks. We will release the complete code to help others reproduce the APP-Net.