 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvanced Skills through Multiple Adversarial Motion Priors in Reinforcement Learning
Paper and Code
Mar 23, 2022

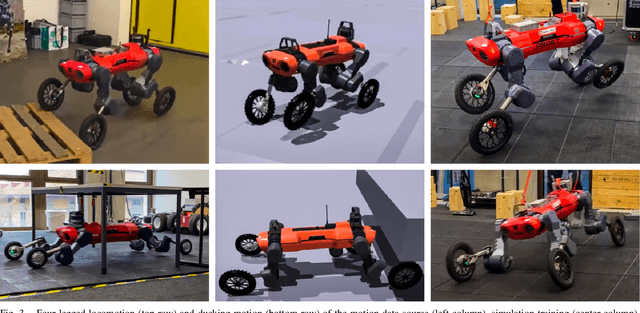

In recent years, reinforcement learning (RL) has shown outstanding performance for locomotion control of highly articulated robotic systems. Such approaches typically involve tedious reward function tuning to achieve the desired motion style. Imitation learning approaches such as adversarial motion priors aim to reduce this problem by encouraging a pre-defined motion style. In this work, we present an approach to augment the concept of adversarial motion prior-based RL to allow for multiple, discretely switchable styles. We show that multiple styles and skills can be learned simultaneously without notable performance differences, even in combination with motion data-free skills. Our approach is validated in several real-world experiments with a wheeled-legged quadruped robot showing skills learned from existing RL controllers and trajectory optimization, such as ducking and walking, and novel skills such as switching between a quadrupedal and humanoid configuration. For the latter skill, the robot is required to stand up, navigate on two wheels, and sit down. Instead of tuning the sit-down motion, we verify that a reverse playback of the stand-up movement helps the robot discover feasible sit-down behaviors and avoids tedious reward function tuning.